- Senzor 3D-Smart O3M
- Aplicaţii
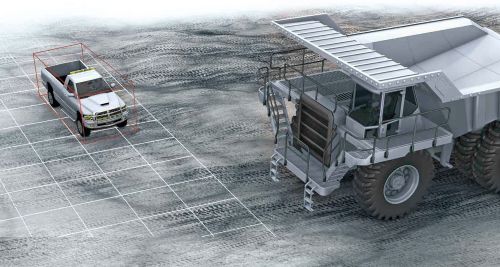
- Previziune coliziune
Senzor 3D-Smart O3M – Recunoaşterea obstacolelor şi previziunea coliziunii
Recunoaşterea obstacolelor şi previziunea coliziunilor
Recunoaşterea integrată automată a obiectelor identifică până la 20 de obiecte în deplasare sau imobile în calea de rulare a unui vehicul de construcţii. Pe baza vitezei, a vectorului de mişcare şi a parametrilor fixe de exemplu calea de frânare este calculată de senzorul 3D probabilitatea de coliziune este transmisă sistemului de comandă al maşinii prin magistrala CAN sau Ethernet şi este semnalizată şoferului.
Recunoaşterea obstacolelor.
Senzorul 3D-Smart identifică poziţia şi mişcarea obiectelor în câmpul său de imagine. Aceste date sunt în continuare emise către sistemul de comandă.
Monitorizarea traseului de deplasare.
Cu ajutorul punctului de referinţă liber reglabil la vehicul sunt identificate numai astfel de obstacole care prezintă o înălţime deasupra suprafeţei solului setată în prealabil.
Sprijinirea şoferului la o macara de stivuire containere.
Previziunea automată a coliziunii susţine conducătorul macaralei la schimbarea poziţiei şi informează despre obstacolele din calea de rulare.