- O3M 3D Smart Sensor – Overview
- Application examples
- Obstacle detection and collision avoidance
O3M 3D Smart Sensor – Obstacle detection and collision avoidance
Obstacle detection and collision avoidance
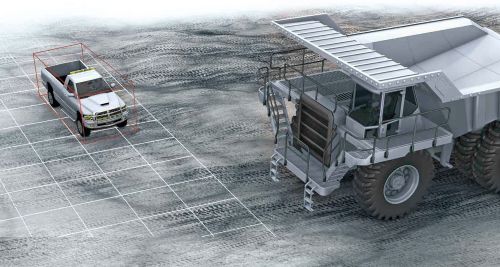
The integrated, automatic object recognition detects up to 20 stationary or moving objects in the path of a construction vehicle. By comparing the current speed, the motion vector and fixed parameters such as the braking distance, the collision probability is calculated by the 3D sensor and transferred to the machine control system via CAN bus or Ethernet and then signalled to the driver.
Obstacle detection
The 3D Smart Sensor detects the position and movement of objects in its field of view. This data is then output to the controller.
Path monitoring
A freely adjustable reference point on the vehicle allows, for example, only obstacles of a pre-defined height above ground to actually be detected as obstacles.
Driver support on a container stacker crane
Automatic collision prediction supports the crane driver with changing the position and informs about obstacles in the path.