- Sensori di visione
- Sensore di visione O2D
- Tecnologia
Tecnologia del sensore di visione O2D
O2D nel dettaglio
Rilevamento contorno
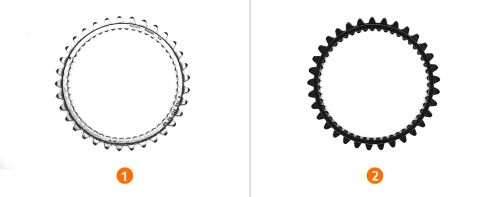
Il rilevamento del contorno è uno strumento importante per l’elaborazione delle immagini 2D. Vengono rilevati i bordi e i passaggi dal primo piano allo sfondo; con le informazioni ottenute viene calcolato il contorno. La peculiarità del rilevamento del contorno sta nel fatto che funziona in modo sicuro anche in caso di influssi dovuti alla luce esterna, in quanto quest’ultima colpisce normalmente tutto l’oggetto. La differenza relativa tra primo piano e sfondo si sposta, ma il contorno viene rilevato con la stessa sicurezza. L’ispezione dell’oggetto avviene nel momento in cui un contorno di riferimento viene confrontato con l’oggetto attuale.
Il contorno viene rilevato tramite:
- Estrazione dell’oggetto da evidenziare rispetto allo sfondo adattando la situazione di illuminazione
- Ottimizzazione del contorno cancellando i settori non necessari
- L’algoritmo rileva i possibili contorni nell’immagine live che vengono distinti come pezzi conformi o non conformi in base ad un valore di soglia (score)
Dove viene applicato il rilevamento del contorno?
La procedura viene utilizzata soprattutto nel rilevamento di modello e forme, nonché nel rilevamento di oggetti come ad esempio nella tranciatura, fresatura e rotazione oppure nel montaggio. In questi settori il rilevamento del contorno serve a garantire la qualità.
Analisi BLOB
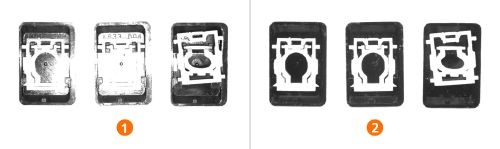
L’analisi di BLOB è un importante metodo per l’elaborazione delle immagini in cui le caratteristiche di un’immagine vengono selezionate e analizzate tramite un gruppo di pixel simili adiacenti.
In questo contesto, BLOB deriva dall’inglese e sta per Binary Logic Data Object, che tradotto liberamente è da intendere come quantità di pixel con lo stesso stato logico. In generale, i pixel adiacenti vengono selezionati con la formazione del valore di soglia della scala dei grigi. Dall’analisi si possono poi trarre conclusioni relative alle singole caratteristiche. Una funzione conosciuta è ad esempio quella dei contatori di pixel.
L’analisi di BLOB avviene tramite:
- Estrazione della regione di interesse dallo sfondo creando il valore di soglia sulla scala dei grigi
- Ottimizzazione dei criteri di ricerca tramite diversi attributi
- Calcolo delle caratteristiche ricercate, ad es. numero di pixel (contatore di pixel), baricentro della superficie, orientamento, forma (ad es. rotondo, rettangolare) e diametro
Dove viene applicata l’analisi di BLOB?
L’applicazione è molto diffusa. Ad esempio, l’analisi di BLOB può essere utilizzata per il controllo della completezza e della presenza o per il rilevamento di filetti, oltre che per contare e selezionare gli oggetti.
Tracciabilità della posizione
L’anchor tracking si esegue grazie ad un contorno anchor che viene trovato una sola volta nell’immagine. In base a questo contorno, si possono tracciare le regioni di interesse di altri modelli (ad es. la regione di interesse di un’analisi di BLOB) in merito a posizione e orientamento.
Rappresentazione grafica dell’anchor tracking in base all’esempio:
Rilevamento di sfere di saldatura su una clip

- Sulle punte di una clip va verificato se sono presenti tutte e tre le sfere di saldatura (indicate in verde).
Dato che il contorno di una sfera di saldatura varia, ma la sua superficie resta costante, si ricorre all’analisi di BLOB.Vengono definite le regioni di interesse indicate in arancione per il controllo della presenza sul settore da controllare. - Per rintracciare dette regioni di interesse in funzione della posizione e dell’orientamento della clip, viene definito un contorno di riferimento, il cosiddetto contorno anchor (indicato in rosa).Il contorno dell'arrotondamento a sinistra della clip viene poi "ancorato" con le regioni di interesse dell'analisi di BLOB.
- Se a questo punto la clip ruota di 20 gradi, il contorno anchor viene trovato anche in questo stato. Le regioni di interesse arancioni dell’analisi di BLOB vengono tracciate automaticamente nella posizione e nell’orientamento corretti.
La famiglia O2D5 di ifm utilizza un processore d'immagine CMOS da 1,2 MP (1280 x 960 pixel).
- Ogni pixel contiene un fotone che raccoglie e amplifica la luce proveniente dalla lente della fotocamera.
- Le microlenti su ciascun pixel massimizzano il contatto con i fotoni.
- Il fotone accumula una carica elettrica proporzionale alla quantità di luce che riceve.
- La carica elettrica viene convertita in un segnale analogico di tensione.
- Il segnale analogico viene trasmesso a un convertitore A/D.
- Il processore d’immagine valuta ogni segnale digitale e lo assembla in un'immagine.
I processori d'immagine CMOS sono più facili, più veloci e più economici da produrre, il che li rende i più utilizzati sul mercato.

La scelta della giusta illuminazione per massimizzare il contrasto di ogni pixel è fondamentale. La famiglia O2D è completa di sorgenti luminose LED integrate ad alta intensità in RGB-W (rosso, verde, blu, bianco) e infrarossi.
Tieni presente che il sensore di immagini non è un sensore di colori!
Tuttavia, la scelta di una sorgente luminosa di colore diverso può avere un effetto drammatico sul contrasto dell'immagine. L'immagine seguente mostra delle penne colorate con la luce naturale e le stesse penne illuminate dai diversi LED del sensore O2D5.
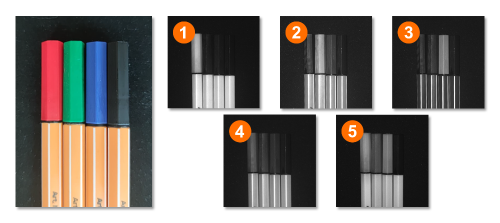
Confronto tra le sorgenti luminose
| Tipo di luce | Nota: |
|---|---|
| Luce naturale (riferimento) |
|
| Luce rossa |
|
| Luce verde |
|
| Luce blu |
|
| Luce bianca |
|
| Luce infrarossa |
|
Effetto del filtro di polarizzazione
A causa dei riflessi, può essere difficile ottenere contorni o aree nitide su oggetti lucidi. I sensori O2D5 con sorgenti luminose RGB-W contengono un filtro di polarizzazione che può essere attivato o disattivato per ridurre al minimo l'effetto dei riflessi.
- Senza filtro di polarizzazione
- Con filtro di polarizzazione