- Kallistusanturit
- Teknologia
Kallistusantureiden teknologia
"Elektroninen vesivaaka”
Useimmissa markkinoilla olevissa kallistusantureissa (kutsutaan myös inklinometreiksi tai tiltti- tai kaltevuusantureiksi) käytetään moniakselista MEMS-kiihtyvyysanturia (MEMS = microelectromechanical system).
Tämäntyyppiset mittakennot ovat hyvin pienikokoisia, tarkkoja ja kestäviä sekä lisäksi kulumis- ja huoltovapaita.
Yksinkertaistettuna MEMS-mittakenno koostuu kahdesta pääkomponentista: liikuteltavasta elektronisesta osasta ja kiinteästä mekaanisesta osasta.
Liikuteltava sisäosa, joka muodostuu koestusmassasta (seisminen massa) ja on varustettu ulkokulmassa sijaitsevilla elektrodeilla, on ripustettu jousielementtien avulla.
Mittakennon kiinteässä ulommassa osassa on myös vastaavat elektrodit.
Minimietäisyydellä toisistaan sijaitsevat elektrodit muodostavat "kamman".
Kun anturi on vaakasuorassa, sen z-akseli on yleensä yhdensuuntainen maavektorin kanssa. Siten sen “absoluuttinen" arvo on nolla.
Jos anturia kallistetaan yhteen suuntaan, sen sisällä oleva liikuteltava massa ja sen elektrodi muuttaa sijaintiaan suhteessa kiinteään elektrodiin.

Yksityiskohtainen näkymä MEMS-kennosta.
- Liike (=kiihtyvyys)
- Kampaelektrodit ~1.3 µm etäisyydellä toisistaan
Näin syntyvä kapasitanssin muutos näiden kahden elektrodin välillä tunnistetaan mittakennossa ja sitä käytetään lopullisen kulma-arvon laskemiseen.
TÄRKEÄÄ!
Jokainen kallistusanturi toimitetaan tehtaalta absoluuttisesti kalibroituna.
Käytettävä referenssi on gravitaatiovektori eli maan vetovoimakiihtyvyys (1g = 9.81 m/s²).
Jos anturin mittausakseli on maavektorin suuntainen, kulmamittausta ei voida tehdä; anturin suuntatieto puuttuu tässä asennossa. Tästä seuraa, että pystysuoran referenssiakselin ympäri tapahtuva suora kulmamittaus (kääntymiskulma) ei ole mahdollinen. Kääntymiskulma on kuitenkin mahdollista laskea epäsuorasti ulkoisen PLC:n avulla.
Katso "Dynaamisen kallistusanturin [JDxxxx] lisätoiminnot".
Kulmamäärittelyt
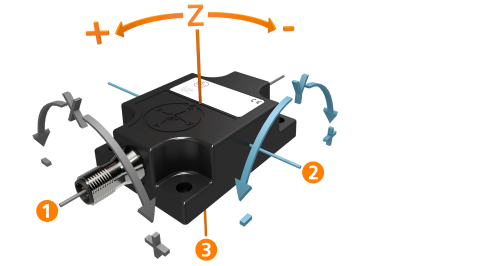
Kulman määrittely, z-akseli nolla-asennossa = gravitaatiovektori
- y-akseli “pyörintä” (pitkittäinen) ⇒ kulma x
- x-akseli “kallistus” (sivuttainen) ⇒ kulma y
- z-akseli “kääntö” (vertikaalinen) ⇒ kulma z