- Czujniki wizyjne
- Czujnik wizyjny O2D
- Technologia
Technologia czujnika wizyjnego O2D
Szczegółowo o O2D
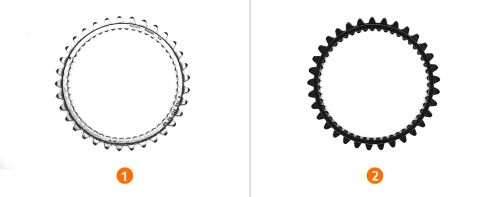
Weryfikacja konturu
Wykrywanie konturu jest ważnym narzędziem do przetwarzania obrazu 2D. Krawędzie oraz przejścia od pierwszego planu do tła są wykrywane ina podstawie tych informacji obliczany jest kontur. Szczególną cechą wykrywania konturu jest to, że działa niezawodnie również wprzypadku zakłóceń powodowanych przez światło obce, ponieważ światło obce zwykle pada na cały obiekt. Względna różnica między pierwszym planem itłem zmienia się, ale kontur jest nadal wykrywany z taką samą dokładnością. Inspekcja obiektu jest następnie przeprowadzana przez dopasowanie konturu odniesienia do bieżącego obiektu.
Wykrywanie konturu odbywa się poprzez:
- Wyodrębnienie obiektu, który ma być wyróżniony z tła za pomocą dostosowania sytuacji oświetleniowej
- Optymalizację konturu za pomocą usunięcia zbędnych obszarów
- Algorytm wykrywający możliwe kontury wobrazie na żywo, które na podstawie wartości progowej (score) są rozróżniane jako dobre lub złe części
Kiedy stosujemy wykrywanie konturów:
metodę tę stosuje się głównie w wykrywaniu wzorów i kształtów, ale także wrozpoznawaniu obiektów, co jest zwykle stosowane przy wykrawaniu, frezowaniu, toczeniu lub montażu. Wykrywanie konturów służy do zapewnienia jakości w tych obszarach.
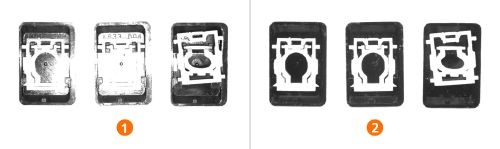
Analiza obiektów blob
Analiza obiektów blob to ważna metoda przetwarzania obrazu, w której cechy obrazu są wybierane i analizowane na grupie podobnych, sąsiadujących ze sobą pikseli.
BLOB (wymyślone słowo Binary Large Object) w tym kontekście oznacza Binary-Logic Data Object, co w swobodnym tłumaczeniu oznacza zbiór pikseli o tym samym stanie logicznym. Wybór sąsiednich pikseli odbywa się na ogół przez przetwarzanie progowe wartości skali szarości. Z analizy można następnie wyciągnąć wnioski dotyczące różnych cech. Dobrze znaną funkcją jest np. licznik pikseli.
Analiza obiektów blob odbywa się poprzez:
- Wyodrębnianie obszaru zainteresowania z tła za pomocą wykrywania przekroczenia progu wartości szarości
- Optymalizację kryteriów wyszukiwania za pomocą różnych atrybutów
- Obliczanie poszukiwanych cech, takich jak liczba pikseli (licznik pikseli), środek ciężkości powierzchni, orientacja, kształt (np. okrągłość, prostokątność) i średnica
Kiedy stosujemy analizę obiektów blob?
Istnieje wiele różnych zastosowań. Na przykład analiza obiektów blob może być wykorzystywana do monitorowania kompletności, wykrywania obecności lub gwintów, a także do zliczania i sortowania obiektów.
Śledzenie pozycji
Śledzenie pozycji odbywa się za pomocą zakotwiczenia konturu, który znajduje się w jednym miejscu na obrazie. Korzystając z tego konturu, strefy wyszukiwania mogą śledzić inne modele (na przykład strefę wyszukiwania analizy obiektów blob) zarówno pod względem pozycji, jak i orientacji.
Graficzna reprezentacja śledzenia pozycji na przykładzie:
Wykrywanie kulek lutowniczych na obejmie cylindra

- Na końcówkach obejmy cylindra należy sprawdzić, czy wszystkie trzy kulki lutownicze są obecne (pokazano na zielono).
Kontur kulki lutowniczej zmienia się, ale jej powierzchnia pozostaje stała, stosowana jest więc analiza obiektów blob. Strefy wyszukiwania pokazane na pomarańczowo są zdefiniowane w celu monitorowania obecności na sprawdzanym obszarze. - W celu śledzenia tych stref wyszukiwania w zależności od położenia i orientacji obejmy cylindra, definiowany jest kontur odniesienia – tzw. kontur kotwiczny (pokazany na różowo). Kontur lewego zaokrąglenia obejmy cylindra jest następnie „zakotwiczony” w strefach wyszukiwania analizy obiektów blob.
- Jeśli obejma cylindra obraca się teraz na przykład o 20 stopni, kontur kotwicy również zostanie obrócony. Pomarańczowe strefy wyszukiwania w analizie obiektów blob są następnie automatycznie śledzone do właściwej pozycji i orientacji.
W rodzinie O2D5 firmy ifm zastosowano procesor obrazu CMOS o rozdzielczości 1,2 MP (1280 x 960 pikseli).
- Każdy piksel zawiera foton, który zbiera i wzmacnia światło z obiektywu kamery.
- Mikrosoczewki na każdym pikselu maksymalizują kontakt fotonów.
- Foton gromadzi ładunek elektryczny proporcjonalny do ilości światła, które otrzymuje.
- Ładunek elektryczny jest przekształcany w analogowy sygnał napięciowy.
- Sygnał analogowy jest przesyłany do konwertera A/D.
- Procesor obrazu ocenia każdy sygnał cyfrowy i składa go w obraz.
Procesory obrazu CMOS są łatwiejsze, szybsze i tańsze w produkcji, dzięki czemu są najczęściej stosowane na rynku.

W celu zmaksymalizowania kontrastu dla każdego piksela ważne jest dobranie odpowiedniego oświetlenia. Rodzina O2D jest dostarczana ze zintegrowanymi źródłami światła LED o wysokiej intensywności w kolorach RGB-W (czerwony, zielony, niebieski, biały) i podczerwieni.
Trzeba mieć na uwadze, że czujnik obrazu nie jest czujnikiem koloru!
Jednak wybór źródła światła o innym kolorze może mieć dramatyczny wpływ na kontrast obrazu. Na poniższym zdjęciu pokazano kredki w świetle dziennym i dla porównania oświetlone różnymi diodami czujnika O2D5.
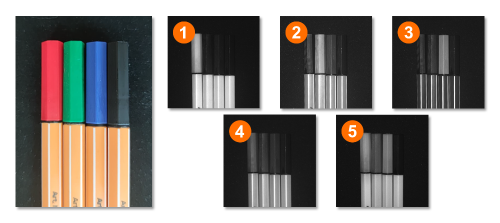
Porównanie różnych źródeł światła
| Rodzaj światła | Uwaga: |
|---|---|
| Światło dzienne (referencyjne) |
|
| Światło czerwone |
|
| Światło zielone |
|
| Światło niebieskie |
|
| Światło białe |
|
| Światło podczerwone |
|
Wpływ filtra polaryzacyjnego
Ze względu na odbicia, uzyskanie ostrych konturów lub obszarów na błyszczących obiektach może być trudne. Czujniki O2D5 ze źródłem światła RGB-W zawierają filtr polaryzacyjny, który można włączyć lub wyłączyć, aby zminimalizować efekt odbić.
- bez filtra polaryzacyjnego
- z filtrem polaryzacyjnym