- Enkodery
- Technologia
Technologia enkoderów
Technologia magnetyczna
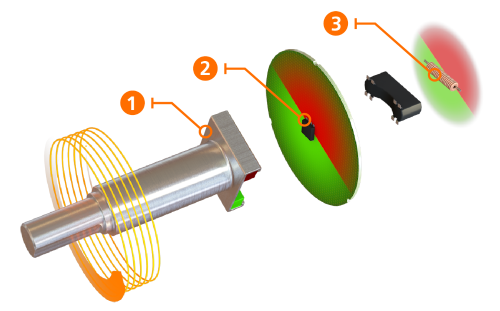
Enkodery magnetyczne wykorzystują czujniki z efektem Halla do wykrywania ruchów obrotowych. Czujniki te wykrywają orientację magnesu stałego przymocowanego do wału. Następnie mikroprocesor oblicza kąt obrotu wału na podstawie sygnałów z czujnika. Ze względu na prostą zasadę mechaniczną enkoder magnetyczny jest mniejszy i znacznie bardziej wytrzymały niż enkoder optyczny.
Również pod względem wydajności pomiarowej nowa generacja enkoderów magnetycznych może obecnie dotrzymać kroku enkoderom optycznym: Dzięki wydajnym mikroprocesorom, zoptymalizowanemu oprogramowaniu do przetwarzania sygnałów i zaimplementowanej kompensacji temperatury, precyzja pomiaru wzrosła do wartości wyższej niż 0,1 stopnia. Odchylenia wynikające z warunków termicznych są zredukowane do minimum. Ponadto czas reakcji enkodera, który wcześniej wynosił od 700 do 1400 mikrosekund, został skrócony do poziomu bliskiego zeru mikrosekund, oferując zachowanie zbliżone do odpowiedzi enkodera optycznego.
Nie dochodzi do utraty wartości: efekt Wieganda
Enkodery magnetyczne wykrywają obroty o kąt od 0 do 360 stopni, natomiast czujnik z efektem Halla nie jest w stanie wykryć liczby pełnych obrotów bez zewnętrznego zasilania. W tym miejscu z pomocą przychodzi zintegrowany system zbierania energii, który bazuje na efekcie Wieganda i zasila obwód licznika obrotów krótkimi, silnymi impulsami napięciowymi. Oznacza to, że enkoder może niezawodnie wykrywać i przechowywać obroty przy niskich prędkościach obrotowych bez zewnętrznego zasilania. Wyklucza to błędne przypisanie pozycji z powodu obrotu wału poza czasem pracy maszyny, na przykład z powodu utraty ciśnienia w mechanizmie podnoszenia.
Technologia optyczna
Bramki świetlne emitują światło przez szczeliny wytrawione na powlekanej szklanej tarczy. Impulsy są generowane w momencie przerwania wiązki.
- Enkodery optyczne są bardzo precyzyjne.
- Enkodery optyczne to bardzo złożone urządzenia składające się z wielu pojedynczych elementów.
- Produkcja powlekanych dysków szklanych jest trudna i kosztowna. W porównaniu z enkoderami wykorzystującymi technologię magnetyczną, łatwo ulegają one uszkodzeniu pod wpływem wstrząsów i drgań.
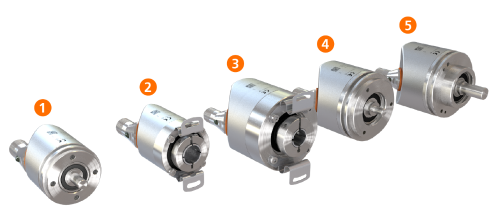
Przegląd typów kołnierzy i wałów
- Typ RB / RMB z kołnierzem synchronicznym i wałkiem 6 mm
- Typ RA / RMA z kołnierzem bezpośrednim i wałem drążonym
- Typ RO / RMO z kołnierzem bezpośrednim i wałem drążonym
- Typ RU / RMU z kołnierzem synchronicznym i wałem pełnym 6 mm.
- RV / RMV z kołnierzem zaciskowym i wałem pełnym 10 mm
Konstrukcje wałów
Wał pełny
Enkodery z wałem pełnym są mocowane do wałów maszyn wirujących o tej samej lub podobnej średnicy za pomocą sprzęgła. Sprzęgła te kompensują mechaniczne przesunięcia między dwoma wałami, zapobiegając w ten sposób ich przedwczesnemu zużyciu. Dzięki temu takie połączenie dobrze nadaje się do zastosowań narażonych na regularne wstrząsy lub wibracje.
Wał drążony
Enkodery z wałem drążonym instaluje się bezpośrednio na obracających się wałach. Nie są wymagane sprzęgła wałowe, co ułatwia montaż. Zamiast nich stosuje się elastyczny kołnierz montażowy, zwany sprzęgłem stojanowym, który kompensuje niewielkie odchylenia montażowe. Enkodery z wałem drążonym otwartym z jednej strony nie mają przelotowego otworu montażowego.
Średnica wału i rozmiar obudowy
Prawidłowa średnica wału jest istotna dla zapewnienia precyzyjnego zamocowania wału wejściowego.
Typowe średnice wałów pełnych to 6 mm, 8 mm i 10 mm.
Typowe średnice wałów drążonych otwartych z jednej strony wynoszą od 6 do 15 mm. Aby zapewnić dużą elastyczność średnic, do wału drążonego wkłada się tuleje dopasowujące o średnicy od 6 do 14 mm.
Średnica zewnętrzna enkodera określana jest zazwyczaj jako rozmiar obudowy. Enkodery marki ifm dostępne są w rozmiarach od 36 do 58 mm.