- Senzori nagiba
- Tehnologija
Tehnologija senzora nagiba
„Elektronička libela”
Većina senzora nagiba (zvani i inklinometri, senzori kosine ili nagiba) danas dostupnih na tržištu sadrži višeosni mjerač ubrzanja MEMS (mikroelektromehanički sustav).
Ove vrste mjernih stanica jako su malene, precizne i otporne te ne podliježu mehaničkom trošenju niti im je potrebno održavanje.
Jednostavnim riječima, mjerna stanica MEMS sadrži dvije glavne komponente: jedan pokretni elektronički dio i jedan pričvršćeni mehanički dio.
Pokretni unutrašnji dio, koji se sastoji od dokazane mase (ispitne mase), opremljen je elektrodama na vanjskom rubu, ovješenima uz pomoć opružnih elemenata.
Pričvršćeni vanjski dio mjerne stanice također sadrži ove elektrode.
Elektrode smještene na minimalnoj međusobnoj udaljenosti čine „češalj”.
Kada je senzor u vodoravnom položaju, njegova os z obično je paralelna sa zemaljskim vektorom. Stoga je njegova vrijednost „apsolutna” nula.
Ako je senzor nagnut u jednom smjeru, unutrašnja pomična masa i njegova elektroda promijenit će položaj u odnosu na pričvršćenu elektrodu.

Detaljan prikaz stanice MEMS
- Gibanje (= ubrzanje)
- Elektrode posložene kao češalj, uz međusobnu udaljenost od približno 1,3µm
Dobivena promjena kapacitivnosti među tim dvjema elektrodama otkriva se mjernom stanicom te se upotrebljava za izračun završne vrijednosti kuta.
VAŽNO!
Svaki senzor nagiba tvornički je opremljen apsolutnom kalibracijom.
Referencija kojom se služi jest gravitacijski vektor, tj. gravitacijsko ubrzanje, 1g (= 9,81m/s²).
Ako je mjerna os senzora paralelna ili podudarna sa zemaljskim vektorom, ne može se provesti mjerenje kuta; u ovom položaju senzoru nedostaje orijentacija. Kao rezultat, izravno mjerenje kuta (otkrivanje vrtnje) oko okomite referentne osi (kut zaošijanja) nije moguće. Međutim, kut zaošijanja može se izračunati neizravno, putem vanjskog programabilnog logičkog upravljačkog uređaja (PLC).
Pogledati „Dodatne funkcionalnosti dinamičkog senzora nagiba [JDxxxx]”.
Definicije kuta
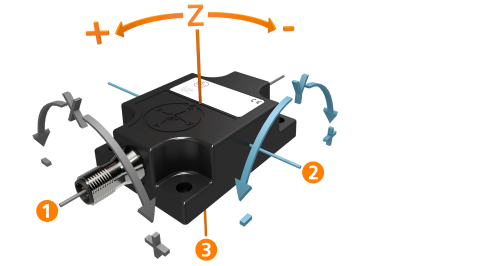
Definicija kuta uz os z na nultom položaju = gravitacijski vektor
- „Valjanje” osi y (longitudinalno) ⇒ kut x
- „Posrtanje“ osi x (lateralno) ⇒ kut y
- „Zaošijanje” osi z (okomito) ⇒ kut z