- Konenäköanturit
- O2D-konenäköanturi
- Teknologia
Teknologia, konenäköanturi O2D
O2D yksityiskohtaisesti
Hahmon tarkistus
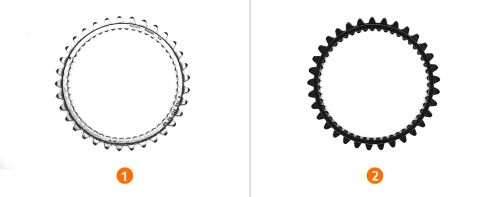
Hahmontunnistus on tärkeä työkalu 2D-kuvankäsittelyssä. Etu- ja taka-alan reunat ja muutoskohdat tunnistetaan, minkä jälkeen ääriviivat lasketaan tämän informaation perusteella. Hahmontunnistuksen erityispiirteisiin kuuluu, että se toimii luotettavasti ulkoisen valaistuksen aiheuttamista häiriöistä huolimatta, sillä ulkoinen valo osuu normaalisti koko kohteeseen. Etualan ja taka-alan välinen suhteellinen ero siirtyy, mutta ääriviivat voidaan silti tunnistaa samalla varmuudella. Kohteen tarkistus suoritetaan sitten vertaamalla k.o. kohdetta ja referenssihahmoa toisiinsa.
Hahmontunnistusmenetelmät:
- Kohteen korostaminen taustasta valaistusta säätämällä
- Hahmon optimointi poistamalla tarpeettomat alueet
- Algoritmi tunnistaa live-kuvasta mahdolliset hahmot, jotka erotellaan hyviksi tai huonoiksi osiksi kynnysraja-arvojen perusteella (merkintä)
Missä hahmontunnistusta käytetään:
Menetelmää käytetään pääasiassa kuvioiden ja muotojen tunnistukseen sekä kohteiden tunnistukseen. Tyypillisiä käyttöalueita ovat puristin-, jyrsin-, sorvi- ja kokoonpanosovellukset. Hahmontunnistusta käytetään näillä alueilla laadunvarmistukseen.
Blob-analyysi
Muotoanalyysi on tärkeä kuvankäsittelymetodi, jossa kuvan ominaisuuksia valitaan ja analysoidaan suhteessa joukkoon samanlaisia viereisiä kuvapisteitä.
Tässä yhteydessä lyhenteellä BLOB (alkuperäinen merkitys Binary Large Object) tarkoitetaan termiä "Binary-Logic Data Object", joka vapaasti käännettynä tarkoittaa sarjaa kuvapisteitä, joilla on sama looginen tila. Viereisten kuvapisteiden valinta tehdään yleensä harmaasävyarvoon perustuvien kynnysarvojen avulla. Analyysin perusteella voidaan sitten vetää johtopäätöksiä erilaisista tunnusluvuista. Tunnettu toiminto on esim. kuvapistelaskuri.
BLOB-analyysimenetelmät:
- Intressialueen erottaminen taustasta harmaasävyarvoon perustuvien raja-arvojen avulla
- Hakukriteerien optimointi erilaisten muuttujien perusteella
- Etsittävien tunnuslukujen, kuten pikselien lukumäärän (kuvapistelaskuri), painopisteen, asennon, muodon (esim. pyöreys, kulmikkuus) ja halkaisijan laskeminen
Missä BLOB-analyysiä käytetään?
Sovellusalueita on useita. BLOB-analyysiä voidaan käyttää esimerkiksi täydellisyyden valvontaan, paikallaolon tunnistamiseen, kierteiden tunnistamiseen sekä kohteiden lukumäärän laskemiseen ja lajitteluun.
Sijainnin jäljittäminen
Paikan seurannassa käytetään ankkuriääriviivaa, joka esiintyy kerran kuvassa. Tätä ääriviivaa käyttämällä hakualueet voivat seurata muiden mallien paikkaa ja suuntausta.
Paikan seurannan graafinen esitys perustuen esimerkkiin:
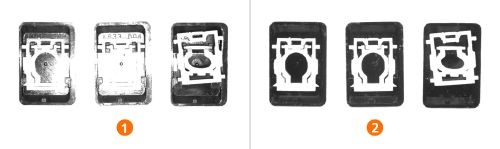
Kiinnikkeen juotospisteiden tunnistus

- Tehtävänä on tarkistaa, että kaikki kiinnikkeen kärjissä olevat kolme juotospistettä ovat paikallaan (näkyvät vihreinä).
Koska juotospisteiden muoto vaihtelee, mutta niiden pinta-ala pysyy vakiona, käytetään tarkistuksessa blob-analyysiä. Oranssina näkyvät hakualueet määritellään tarkistettavalla alueella suoritettavaa paikallaolon valvontaa varten. - Kiinnikkeen sijainnista ja asennosta riippuvien hakualueiden jäljittämiseksi määritellään referenssihahmo - nk. ankkurihahmo (näkyy vaaleanpunaisena). Kiinnikkeen vasemman pyöristyksen ääriviiva "ankkuroidaan" blob-analyysin hakualueiden avulla.
- Jos kiinnikettä käännetään esimerkiksi 20 astetta, ankkuriääriviiva näkyy myös käännettynä. Blob-analyysin oranssinväriset hakualueet asemoidaan sitten automaattisesti oikeaan paikkaan ja oikean suuntaisina.
ifm:n O2D5 -sarjan antureissa käytetään 1,2 MP (1280 x 960 pikseliä) CMOS-kuvaprosessoria.
- Jokainen kuvapiste sisältää fotonin, joka kerää ja vahvistaa kameran linssiltä tulevaa valoa.
- Jokaisen kuvapisteen pinnalla olevat mikrolinssit maksimoivat fotonien suorituskyvyn.
- Fotoni akkumuloi vastaanotettuun valon määrään verrannollista sähköistä varausta.
- Tämä sähköinen varaus muunnetaan analogiseksi jännitesignaaliksi.
- Analogiasignaali siirretään sitten A/D-muuntimeen.
- Kuvaprosessori arvioi jokaisen digitaalisen signaalin ja yhdistää ne kuvaksi.
CMOS-kuvaprosessorit ovat helpompia, nopeampia ja halvempia valmistaa, mikä tekee niistä markkinoiden laajimmin käytetyn teknologian.

Kunkin kuvapisteen kontrastin maksimoimiseksi on tärkeää valita oikeanlainen valaistus. O2D-tuoteperheen laitteet toimitetaan sisäänrakennetuilla, valovoimaisilla RGB-W (punainen, vihreä, sininen, valkoinen) ja infrapuna-LED-valolähteillä varustettuina.
Huom.! Hahmontunnistin ei ole värintunnistusanturi!
Oikeanvärisen valolähteen valinnalla voi olla kuitenkin dramaattinen vaikutus kuvan kontrastiin. Alla oleva kuva esittää värikyniä päivänvalossa ja vertailun vuoksi valaistuna O2D5-sarjan anturin erilaisilla LED:eillä.
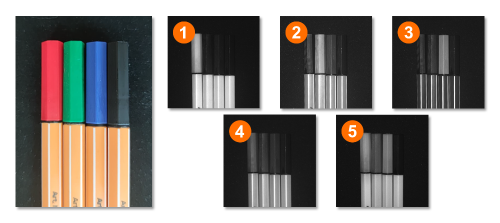
Erilaisten valolähteiden vertailu
| Valotyyppi | Huom.! |
|---|---|
| Päivänvalo (referenssi) |
|
| Punainen valo |
|
| Vihreä valo |
|
| Sininen valo |
|
| Valkoinen valo |
|
| Infrapunavalo |
|
Polarisaatiosuodattimen vaikutus
Heijastusten vuoksi voi joskus olla vaikeaa erottaa tarkkoja ääriviivoja tai alueita kirkkailla kohteilla. RGB-W -valolähteellä varustetut O2D5-sarjan anturit sisältävät polarisaatiosuodattimen, joka voidaan kytkeä päälle tai pois päältä heijastusten vaikutusten minimoimiseksi.
- ilman polarisaatiosuodatinta
- polarisaatiosuodattimella