- Kulma-anturit
- Teknologia
Kulma-anturiteknologia
Magneettinen teknologia
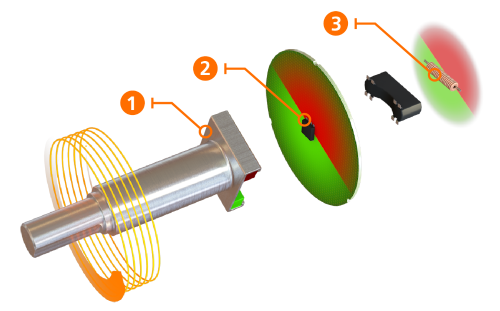
Magneettiset kulma-anturit hyödyntävät Hall-ilmiötä pyörivien liikkeiden tunnistamisessa. Anturit tunnistavat akseliin kiinnitetyn kestomagneetin suunnan. Mikroprosessori laskee sitten akselin kääntymiskulman anturisignaalien perusteella. Yksinkertaisen mekaanisen periaatteensa ansiosta magneettinen kulma-anturi on pienempi ja kestävämpi kuin optinen kulma-anturi.
Myös mittaussuorituskyvyn suhteen uuden sukupolven magneettiset kulma-anturit pärjäävät optisille versioille: Tehokkaiden prosessorien, optimoidun signaalinkäsittelyohjelmiston ja sisäänrakennetun lämpötilakompensoinnin ansiosta niillä saavutetaan jopa 0,1 asteen mittaustarkkuus. Lämpötilaolosuhteista johtuvat poikkeamat vähennetään minimiinsä. Lisäksi antureiden vasteaikaa, joka aikaisemmin vaihteli välillä 700...1400 mikrosekuntia, on saatu lyhennettyä lähelle 0 mikrosekuntia, ja ne tarjoavat siten vastekäytöksen, joka on lähellä optisia antureita.
Arvot eivät häviä: Wiegand-ilmiö
Magneettiset kulma-anturit tunnistavat 0 ja 360 asteen välillä olevat pyörimisliikkeet, mutta Hall-ilmiön avulla ei voida tunnistaa kokonaisia kierroksia ilman ulkoista jännitesyöttöä. Tässä kohtaa tulee kuvaan sisäänrakennettu energiankeruujärjestelmä, joka perustuu Wiegand-ilmiöön ja muodostaa kierroslaskuripiirin, joka toimii lyhyiden, voimakkaiden jännitepulssien avulla. Tämä tarkoittaa sitä, että kulma-anturi pystyy luotettavasti tunnistamaan ja tallentamaan hitaat kierrokset ilman ulkoista jännitesyöttöä. Tämä sulkee pois mahdolliset kohdennusvirheet, jotka johtuvat koneen käyntiajan ulkopuolella tapahtuneista akselin liikkeistä esim. nostomekanismin paineen laskun vuoksi.
Optinen teknologia
Lähetin/vastaanotinparit lähettävät valoa pinnoitettuun lasilevyyn syövytettyjen urien läpi. Pulssit muodostetaan näiden valonsäteiden katketessa.
- Optoelektroniset kulma-anturit ovat erittäin tarkkoja.
- Ne ovat monimutkaisia laitteita, jotka koostuvat monista yksittäisistä komponenteista.
- Antureissa käytettävien pinnoitettujen lasilevyjen valmistus on vaikeaa ja kallista. Magneettista teknologiaa käyttäviin antureihin verrattuna ne rikkoontuvat helposti altistuessaan iskuille ja tärinälle.
Laippa- ja akselityypit - yhteenveto
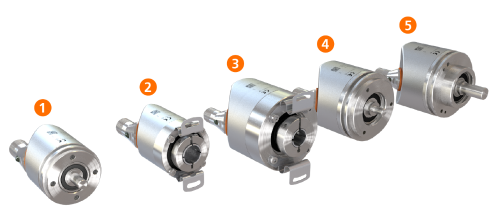
- RB / RMB -mallit, synkrolaippa, 6 mm akseli
- RA / RMA -mallit, suora laippa, holkkiakseli
- RO / RMO -mallit, suora laippa, holkkiakseli
- RU / RMU -mallit, synkrolaippa, 6 mm umpiakseli
- RV / RMV -mallit, clamp-laippa laippa, 10 mm umpiakseli
Akselirakenteet
Umpiakseli
Umpiakseliset anturit kytketään pyörivien koneiden saman- tai lähes samankokoisiin akseleihin joustokytkimien (kytkyjen) avulla. Nämä joustokytkimet kompensoivat näiden kahden akselin väliset kohdistuspoikkeamat ja ehkäisevät siten ennenaikaista kulumista. Tämän vuoksi yhdistelmä sopii hyvin sovelluksiin, joissa laitteet altistuvat iskuille ja tärinälle.
Holkkiakseli
Holkkiakseliset anturit asennetaan suoraan pyöriville akseleille. Erillisiä joustokytkimiä ei tarvita, mikä helpottaa asennusta. Sen sijaan niissä käytetään staattorijoustokytkimeksi kutsuttavaa joustavaa asennuslaippaa, joka kompensoi asennuksessa syntyvät pienet kohdistuspoikkeamat. Vain toiselta puolelta avoimissa holkkiakseleissa ei ole koko akselin läpi menevää reikää.
Akselin halkaisija ja kotelokoko
Oikea akselihalkaisija on tärkeä siksi, että se varmistaa, että sisään tuleva akseli pysyy tarkasti paikallaan.
Yleisimmät umpiakseleiden halkaisijat ovat 6 mm, 8 mm ja 10 mm.
Toiselta puolelta avointen holkkiakseleiden yleisimmät halkaisijat ovat 6 mm ja 15 mm. Halkaisijoita koskevan joustavuuden saavuttamiseksi holkkiakselissa voidaan käyttää 6 - 14 mm adapterimuhveja.
Kulma-anturin ulkohalkaisijaa kutsutaan yleensä kotelokooksi. ifm:n antureissa nämä halkaisijat ovat 36 - 58 mm.