- Kulma-anturit
- Sovelluksia
Sovellusesimerkkejä
Pyörivät, pystysuuntaiset ja lineaariset liikkeet
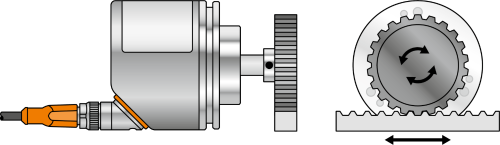
Esimerkki: Nostolaitteiden korkeuden mittaus hammaspyörälle asennetun monikierroksisen absoluuttianturin avulla.
Pyörimis- ja etäisyysmittaukset
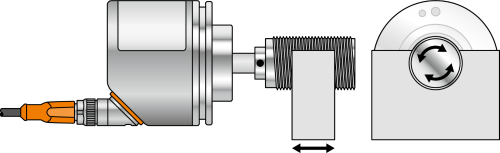
Esimerkki: Karan tarkka paikan säätö monikierroksisen absoluuttianturin avulla:
Pyörivät ja lineaariset liikkeet
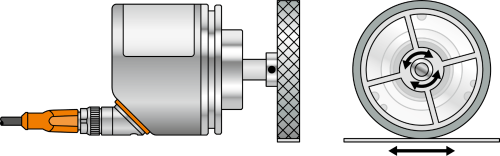
Esimerkki: Lineaarimittaus mittapyörän ja inkrementaalianturin avulla.
Pyörivän liikkeen nopeuden määrittely
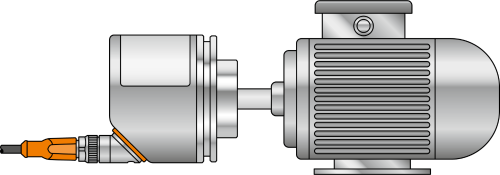
Esimerkki: Moottoreiden pyörintänopeuden tunnistus inkrementaalianturin avulla.
Paikan määrittely pyörivässä liikkeessä
Esimerkki: Pyörivien indeksointipöytien paikoitus erilaisia tuotantoportaita varten yksikierroksista absoluuttianturia käyttäen.
Kulman määrittely pyörivässä liikkeessä
Esimerkki: AGV-ajoneuvojen ohjauskulman tunnistus yksikierroksisen absoluuttianturin avulla.
Käyttö trukeissa ja AGV-ajoneuvoissa
Monikierroksiset IO-Link -kompaktikulma-anturit sopivat erityisen hyvin trukki- ja AGV-käyttöön. Halkaisijaltaan vain 36 mm oleva kotelo mahdollistaa asennuksen ahtaisiinkin tiloihin. Ne voidaan liittää kaikkiin yleisimpiin ohjausjärjestelmiin AL1xx -sarjan IO-Link -masterin ja standardin M12-kaapelin avulla. Tämä tekee kalliista, asennusta vaativista kenttäväyläkaapeleista vanhanaikaisia ja tarpeettomia.
Haarukan leveyssäätö
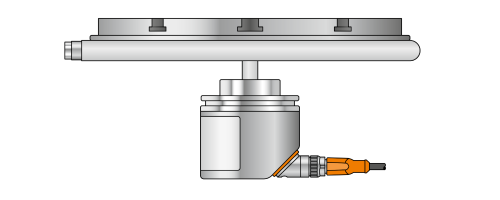
Trukin nostohaarukan leveyttä säädetään hammaspyörän ja kehikon avulla. Hammaspyörän akselille asennettu absoluuttianturi määrittelee haarukan tarkan leveyden ja raportoi sen ohjausjärjestelmään.
Haarukan korkeus
Haarukan tarkan korkeuden määrittelemiseksi absoluuttianturi tunnistaa vaijerikelan kierrokset ja lähettää tämän tiedon näyttöyksikköön ja ohjausjärjestelmään.
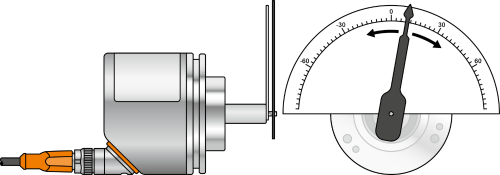
Ohjauspyörä ja ohjaus
Ohjausjärjestelmään asennetaan kaksi kulma-anturia: Samalla, kun toinen anturi määrittelee pyörän tarkan ohjauskulman, toinen mittaa ajomoottorin akselilta kaksi prosessiarvoa: pyörintänopeus min.-1ja pyörän tarkka sijainti.
Muita koneita
Pellin leikkaus levytyöstökeskuksessa
Päättymätön peltinauha kulkee koneen läpi ja siitä leikataan määrätyn mittaisia paloja. Optoelektroninen anturi tarkkailee pellin etureunaa ja käynnistää laskuprosessin nollaamalla mittapyörälle asennetun pulssianturin kytkinsignaalin avulla. Tämä ifm:n pulssianturin suora nollaustulo tarkoittaa käytännössä sitä, että tässä prosessissa ei tarvita PLC:tä ollenkaan. Nopeissakin prosesseissa aikareleet ja niistä seuraavat mekaaniset siirtymät voidaan välttää tehokkaasti. Pituusmittauksen lisäksi IO-Link -kulma-anturi välittää toisena prosessiarvona myös hihnan nopeuden.
Puhaltimen valvonta
Puhaltimen akselille asennettuna kulma-anturi ei valvo vain nopeutta. Se rekisteröi myös käyttötunnit huoltovälien optimointia varten.
Lämpömuovauspakkauskone
Kuljetinhihnan nopeus pitää tahdistaa syötettävän filmin kanssa. Mittapyörille asennetut kulma-anturit valvovat tarkasti nopeutta ja raportoivat pienimmistäkin poikkeamista ohjausjärjestelmään.
Rullarata
Pitkät kuljetinlinjat koostuvat yksittäisistä, erikseen ohjattavista segmenteistä. Ruuhkien tai törmäysten ehkäisemiseksi käyttöjen akseleille asennetaan kulma-antureita varmistamaan, että kaikki toimivat samalla nopeudella.
Riippukuljetin
Teurastamossa koukuista riippuvat ruhonpuolikkaat siirretään riippukuljettimilta varastohihnalle. Kitkattoman siirron varmistamiseksi molempien järjestelmien pitää toimia täysin samassa tahdissa. Molemmissa järjestelmissä olevat kulma-anturit varmistavat, että järjestelmät toimivat täydellisesti synkronissa. Haponkestävän teräskotelonsa ja hyvän suojausluokkansa (IP68/69K) kulma-anturit kestävät mainiosti teurastamojen äärimmäisen haastavia pesuprosesseja.