- Full-metal ultrasonic sensors
- Technology
Ultrasonic technology overview
Ultrasonic sensors detect all sound-reflecting objects and measures the time from transmission to reception of a sound signal. The target’s color, transparency and surface reflectivity are irrelevant.
Comparison of ultrasonic sensors with other position sensing products
This chart rates the performance of various technologies with certain influences.

1) e.g. thin, clear-transparent film/glass 2) if no mutual interference 3) if non-conductive 4) if not too thick
Often, the question comes up “Should I use a diffuse photoelectric sensor or an ultrasonic sensor?" The following chart dives more deeply into this question.

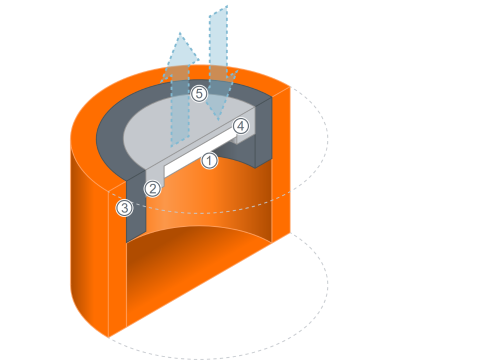
Operating principle

For operation, the transducer is stressed by high voltage. This causes the transducer to vibrate due to the piezo-electric effect and transmit a sound burst into the air. At this point, the clock-pulse generator switches the sensor to receive mode and time measurement begins. When the sound burst hits the target, an echo is reflected back at the transducer. The echo of the sound burst causes the transducer to vibrate due to the piezo-electric effect and time measurement stops.

Ultrasonics transducer contruction
Detection zone – diffuse ultrasonic sensors
Some ultrasonic sensors rely solely on the echo from a target. These are known as diffuse reflection sensors. The following figure shows the detection zone and output status. Note the blind zone – the minimum distance required for the sensor to generate, receive and evaluate a signal.

All linear directions of movement (x,y,z) possible. Avoid axis rotation >4°.
Application area – retro-reflective ultrasonic sensors
Retro-reflective sensors are used for objects with poor sound reflection performance such as foam, ragged surfaces and for angled shapes. There is no blind zone with these sensors; however, a reflector, such as a metal plate or wall is required.

Sound / response curves
Response curves help the user determine the suitability of a particular ultrasonic sensor to solve a specific application. These curves are shown on the product datasheet and in the “Info Card” available for download from the datasheet and are relevant to targets approaching the sensor laterally.

- Distance. In x-axis, the sensing range. In y-axis, the width of the sound beam.
- Detection zone. Half of the target face must be within this zone to be detected.
- Switch-on curve. When the edge of the target reaches this curve, the output switches.
- Target. Standard target size is 200 mm x 200 mm.
- Shows 50% of the target in the detection zone.
- Switch point.
For targets approaching the sensor axially (as in a tank level application), the sensor will detect the target as soon as it reaches the switch-on curve.
Testing in the specific application may be needed to ensure proper function.
Factors of influence
Ultrasonic sensors are not affected by changes in air temperature (they have temperature compensation built in), air pressure and humidity. However, other factors can effect performance.
- Air turbulence – strong air turbulence can negatively influence the sound propagation and, consequently, the measurement. Sources of air turbulence include wind, compressed air and cooling fans. The influence can be minimized by physically shielding the sensor / measuring distance from the turbulence.
- Target material and surface characteristics – materials that absorb sound or surfaces that deflect sound away from the receiver are difficult to sense with ultrasonic sensors. A through beam photoelectric solution may be better.
- Target speed – Diffuse ultrasonic sensors typically have switching frequencies of 10 Hz or less and are not useful for high-speed applications.
- Target size – ultrasonic sensors are unable to sense tiny targets typically detected with laser sensors. Small targets may be detected, but usually at the cost of decreased sensing range.
- Target orientation – for diffuse ultrasonic applications, the face of the sensor should be parallel to the target. Deviations up to 4° can be tolerated on smooth surfaces.
- Excessive soiling of the face – small amounts of dust and moisture can be shed through the vibration of the face, but large amounts will degrade performance.
- Crosstalk – ultrasonic sensors are prone to crosstalk if they are mounted too close together. Observe mounting distances specified in the installation instructions.