- Vision sensörleri
- O2D görüntü sensörü
- Teknoloji
Teknoloji Görüntü Sensörü O2D
Ayrıntılı olarak O2D
Kontur doğrulama
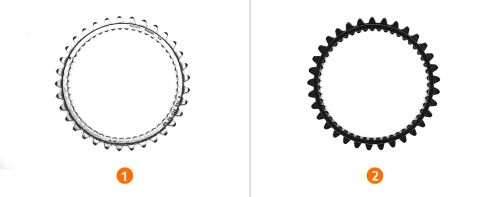
Kontur algılama, 2D görüntü işleme için önemli bir araçtır. Ön plandan arka plana geçişler ve kenarlar algılanır, ilgili bilgiler aracılığıyla bir kontur hesaplanır. Kontur algılamanın özel özelliği, dış ışıklardan ve genelde tüm nesneye çarpan dış ışıklardan kaynaklanan parazitlerle de güvenilir şekilde çalışmasıdır. Ön plan ve arka plan arasındaki bağıl fark kayar, fakat kontur, yine eşit kesinlikle algılanır. Daha sonra, nesne denetimi işlemi, bir referans kontur ve mevcut nesne eşleştirilerek gerçekleştirilir.
Aşağıdakiler aracılığıyla kontur algılama:
- Vurgulanacak nesnenin, aydınlatma durumu ayarlanarak arka plandan çıkartılması
- Gereksiz alanlar silinerek konturun optimizasyonu
- Algoritma, canlı görüntüde bulunan ve bir eşik değeri (puan) temel alınarak iyi veya kötü parçalar şeklinde birbirinden ayrılan olası konturları algılar
Kontur algılama nerelerde uygulanır:
Bu yöntem esasen, tipik olarak delik açma, frezeleme, tornalama veya montajda uygulandığı gibi model ve şekil algılamada ve nesne tanımada kullanılır. Kontur algılama, bu alanlarda kalite güvencesi için kullanılır.
Blob analizi
Blob analizi, komşu piksellerden oluşan bir grubun görüntü özelliklerinin seçildiği analiz edildiği önemli bir görüntü işleme yöntemidir.
BLOB'un (yeni türetilen Binary Large Object sözcüğü) bu bağlamdaki açılımı, Binary-Logic Data Object, yani yaklaşık çevirisiyle, aynı mantıksal duruma sahip bir piksel grubudur. Komşu piksellerin seçimi, genelde gri ölçek değeri için bir eşik değer tanımlanarak gerçekleştirilir. Daha sonra, analizin çeşitli karakterleriyle ilgili olarak sonuçlar çıkarılabilir. Bilinen bir fonksiyon, örn. piksel sayacıdır.
Aşağıdakiler aracılığıyla blob analizi:
- Gri değerine göre eşik değeri tanımlanarak ilgilenilen alanı arka plandan çıkartma
- Çeşitli nitelikler aracılığıyla arama kriterlerini optimize etme
- Piksel sayısı (piksel sayacı), alan ağırlık merkezi, yön, şekil (örn. yuvarlaklık, dörtgenlik) ve çap gibi aranan karakteristiklerin hesaplanması
Blob analizi nerelerde uygulanır?
Birçok farklı uygulama mevcuttur. Blob analizi, örneğin tamlık denetimi, varlık tespiti veya diş algılama ve nesneleri sayma ve sınıflandırma işlemleri için kullanılabilir.
Pozisyon takibi
Konum takibi, görüntüde bir kez bulunan bir çapa kontür aracılığıyla gerçekleştirilir. Bu kontur kullanılarak, arama bölgeleri pozisyon ve yön olarak diğer modelleri izleyebilir (örn. bir blob analizinin arama bölgesi).
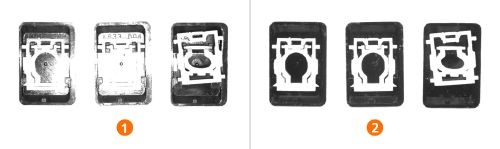
Aşağıdaki örnek temel alınarak bir konum takibinin grafik gösterimi:
Bir silindir kelepçenin üzerindeki lehim toplarını algılama

- Bir silindir kelepçenin uçlarında, üç lehim topunun hepsinin mevcut olup olmadığı kontrol edilmelidir (yeşil renkle gösterilir).
Bir lehim topunun konturları farklılık gösterdiği, fakat lehim topu alanı sabit kaldığı için blob analizi kullanılır. Turuncu renkle gösterilen arama bölgeleri, kontrol edilecek alan boyunca varlık izleme için tanımlanmıştır. - Bu arama bölgelerini silindir kelepçenin pozisyonuna ve yönüne bağlı olarak izlemek için çapa kontur olarak da adlandırılan bir referans kontür tanımlanmıştır (pembe renkle gösteriliyor). Daha sonra, silindir kelepçenin soldaki yuvarlak kısmının kontürü, blob analizinin arama bölgeleriyle "bağlanır".
- Silindir kelepçe şu anda 20 derece dönerse, örneğin döndürülmüş durumda çapa kontur da bulunur. Bu durumda, blob analizinin turuncu arama bölgeleri doğru pozisyona ve yöne göre otomatik olarak izlenir.
ifm'nin O2D5 ailesi, 1,2 MP (1280 x 960 piksel) özellikli bir CMOS görüntü işlemcisi kullanır.
- Her piksel, kamera lensinden gelen ışığı toplayan ve yükselten bir foton içermektedir.
- Her pikselde bulunan mikro mercekler, foton temasını en üst seviyeye çıkarır.
- Foton, aldığı ışık miktarıyla orantılı olacak şekilde bir elektrik yükü biriktirir.
- Elektrik yükü bir analog voltaj sinyaline dönüştürülür.
- Analog sinyal bir A/D dönüştürücüye iletilir.
- Görüntü işlemcisi her dijital sinyali değerlendirir ve bir görüntüde birleştirir.
CMOS görüntü işlemcileri üretimlerinin daha kolay, daha hızlı ve daha ucuz olmaları nedeniyle piyasada yaygın olarak kullanılırlar.

Her piksel için kontrastı en üst seviyeye çıkarmak adına doğru aydınlatmayı seçmek önemlidir. O2D ailesi, RGB-W (kırmızı, yeşil, mavi, beyaz) ve kızılötesinde entegre yüksek yoğunluklu LED ışık kaynaklarıyla birlikte kullanıma sunulmaktadır.
Görüntü sensörünün bir renk sensörü olmadığını lütfen unutmayın!
Bununla beraber, farklı renge sahip bir ışık kaynağı seçmek, görüntünün kontrastı üzerinde çarpıcı bir etkiye sahip olabilir. Aşağıda yer alan resim, gün ışığı ortamında ve karşılaştırma amacıyla, O2D5 sensörünün farklı LED'leri tarafından aydınlatılan boya kalemlerini göstermektedir.
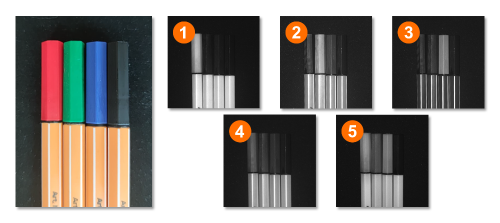
Farklı ışık kaynaklarının karşılaştırılması
| Işık türü | Dikkat: |
|---|---|
| Gün ışığı (referans) |
|
| Kırmızı ışık |
|
| Yeşil ışık |
|
| Mavi ışık |
|
| Beyaz ışık |
|
| Kızılötesi ışık |
|
Polarizasyon filtresinin etkisi
Parlak nesneler üzerinde, yansımalardan dolayı keskin konturlar veya alanlar elde etmek zor olabilir. RGB-W ışık kaynaklarına sahip olan O2D5 sensörleri, yansımaların etkisini en aza indirgeyebilmek için açılıp kapatılabilen bir polarizasyon filtresi içermektedir.
- polarizasyon filtresiz
- polarizasyon filtresi ile