- Encoders
- Encoders absolutos
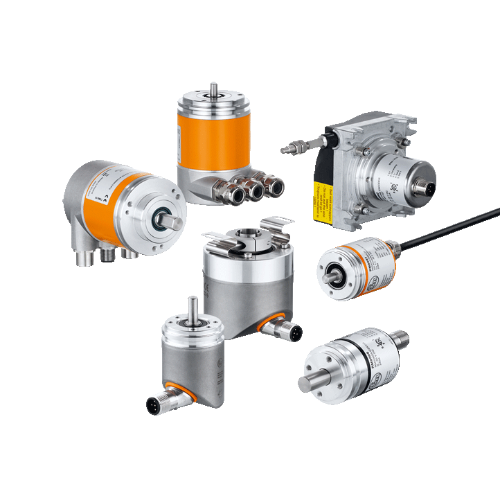
Encoders absolutos
Os encoders absolutos, também conhecidos como encoders angulares, atribuem um valor inequívoco a cada posição angular, apenas para uma rotação (mono-volta) ou para várias rotações do eixo (multi-voltas):
Os encoders absolutos com tecnologia óptica transmitem luz através de áreas gravadas num disco de vidro revestido. Os pulsos são então gerados através da interrupção dos raios.
Encoders absolutos que utilizam tecnologia magnética, geram pulsos girando um ímã sobre um chip de detecção (sensor Hall) e medindo a mudança da área (efeito Hall).
Em caso de queda de energia, a clara posição do eixo de encoders absolutos é mantida. Ao contrário dos encoders incrementais convencionais, não é necessário um referenciamento para a posição inicial ou posição inicial após o restabelecimento da alimentação de energia.
Versões
| Tipo | InvólucroØ [mm] | Eixo maciço Ø [mm] | Eixo vazado Ø [mm] | Resolução | Características |
|---|---|---|---|---|---|
 Absoluto multi-voltas |
36,5 mm 42 mm 58mm |
6 mm 10 mm |
12 mm 15 mm |
24 bits 25 bits 31 bits |
• Resolução e sinal ajustáveis • Interface Profibus, ProfiNet DeviceNet, SSI, CANopen e IO-Link |
 Absoluto mono-volta |
58mm | 6 mm 10 mm |
- | 13 bits | • Resolução e sinal ajustáveis • Interface Profibus e CAN |
Existem encoders absolutos com saídas paralelas, em série ou de barramento de campo para a transmissão dos dados da posição do eixo.
- Encoders absolutos com saídas paralelas requerem uma saída para cada bit de informação. Por exemplo, um encoder absoluto com uma saída paralela de 12 bits precisaria de doze saídas separadas para a transmissão de dados. Este encoder teria uma resolução de 4096.
- Os dados da posição do encoder também podem ser transmitidos sem série através da interface síncrona serial (SSI).
Encoders absolutos multi-voltas
Estes tipos de encoders determinam a posição exata através da visualização de um código no disco e também durante várias rotações.
Mais precisamente, este código consiste na posição no disco (resolução) e na posição da relação de engrenagens (rotações). Os encoders multi-voltas são adequados para medições de ângulo, bem como para medições de comprimentos e distâncias. Existem as respectivas versões com interfaces para Devicenet, Profinet, Profibus, CANopen, Ethernet IP e EtherCAT.
Os encoders multi-voltas também podem ser operados com IO-Link .A vantagem disso é que um encoder pode ser usado para uma ampla variedade de barramentos de campo, usando um mestre IO-Link. Isso economiza custos de armazenamento. Além disso, pode ser utilizado o cabeamento padrão de baixo custo. Em geral, é possível reduzir tanto o trabalho de cabeamento quanto a suscetibilidade a falhas, assim que a infraestrutura IO-Link esteja expandida.
Encoders absolutos mono-voltas
Estes encoders produzem um valor codificado inequívoco para cada posição do eixo.
Eles são utilizados em aplicações em que o eixo não gira mais de 360 graus.
Existem versões com interface Profibus ou CAN.
Todos os encoders incrementais da ifm funcionam como encoders absolutos mono-volta quando utilizados com IO-Link. Eles detectam e salvam seus valores de posição mesmo quando a tensão cai.