- Encoders
- Tecnologia
Tecnologia e encoders
Tecnologia magnética
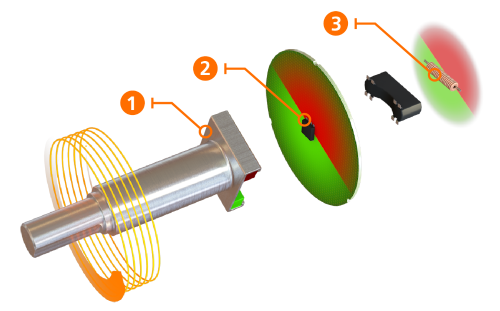
Os encoders baseados na tecnologia magnética utilizam sensores de efeito Hall para detectar movimentos rotativos. Para isso, os sensores detectam a orientação de um ímã permanente fixo ao eixo do encoder. Um microprocessador calcula então o ângulo de rotação do eixo a partir dos sinais dos sensores. Devido ao princípio mecânico simples, o encoder magnético é superior à versão óptica, uma vez que também é consideravelmente mais robusto com um tamanho menor.
Agora, a nova geração de encoders com tecnologia magnética também se compara com encoders ópticos em termos de desempenho de medição: Graças aos microprocessadores avançados de alto desempenho, o software de processamento de sinal otimizado e a compensação de temperatura implementada aumentam a precisão da medição para menos de 0,1 grau. Os desvios térmicos são reduzidos ao mínimo. Ao mesmo tempo, o tempo de resposta do encoder, que se encontrava anteriormente entre 700 e 1400 microssegundos, é reduzido para quase zero microssegundos, oferecendo assim o comportamento de resposta de um encoder óptico.
Nenhum valor é perdido: o efeito Wiegand
Os encoders magnéticos detectam rotações de 0 a 360 graus, mas sem alimentação elétrica externa, o sensor de efeito Hall não consegue detectar o número de rotações inteiras. Isto é corrigido pelo sistema de captação de energia elétrica integrado, que se baseia no efeito Wiegand e fornece pulsos de tensão curtos e potentes ao circuito do tacômetro. Isto significa que mesmo sem uma fonte de alimentação externa, o encoder consegue detectar e armazenar de forma confiável rotações a baixa velocidade. Assim é impossível uma atribuição de posição incorreta devido à rotação do eixo fora dos tempos de funcionamento da máquina, por exemplo, devido à perda de pressão em um mecanismo de elevação.
Tecnologia óptica
Barreiras fotoelétricas brilham através de orifícios, que foram gravados em uma placa de vidro revestida. Pulsos são gerados através da interrupção dos raios.
- Encoders ópticos são muito precisos.
- Encoders ópticos são dispositivos complexos e são compostos por várias peças.
- A produção de discos de vidro revestidos é difícil e cara. Em comparação com encoders com tecnologia magnética, eles quebram facilmente quando submetidos à choques e vibrações.
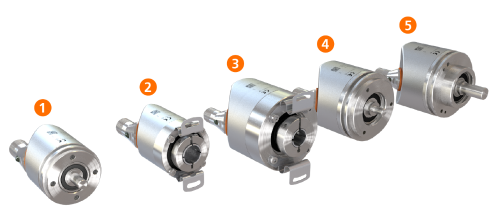
Visão geral das versões de flange e de eixos
- Modelo RB / RMB como flange sincrônico com eixo de 6 mm
- Modelo RA / RMA como flange direto com eixo vazado
- Modelo RO / RMO como flange direto com eixo vazado
- Modelo RU / RMU como flange sincrônico com eixo maciço de 6 mm
- Modelo RV / RMV como flange de aperto com eixo maciço de 10 mm
Versões de eixo
Eixo maciço
Encoders de eixo maciço são instalados com a ajuda de um acoplamento nos eixos rotativos de máquinas que possuem um diâmetro igual ou semelhante. Estes acoplamentos compensam o desalinhamento mecânico entre os dois eixos, evitando o desgaste precoce. Portanto, esta combinação é particularmente adequada para cargas de impacto ou vibração regulares
Eixo vazado
Encoders de eixo vazado são instalados diretamente no eixo de rotação. Não são necessários acoplamentos dos eixos, por isso a montagem é mais fácil. Em vez disso, eles utilizam um flange de montagem flexível denominado acoplamento do estator. Este pode reduzir pequenas imprecisões de montagem. Os encoders com eixo vazado aberto de um lado não têm uma furação de montagem contínua
Diâmetros de eixo e tamanho
O diâmetro correto do eixo é importante para a precisão de montagem ideal do eixo de entrada.
Diâmetros comuns para eixos maciços são 6 mm, 8 mm e 10 mm.
Diâmetros comuns de eixos vazados abertos unilateralmente estão entre 6 mm ou 15 mm. Os tubos redutores dos tamanhos de 6 a 14 mm são inseridos no eixo vazado para um elevado grau de flexibilidade dos diâmetros.
O diâmetro externo é geralmente entendido como o tamanho de um encoder. Os encoders da ifm estão disponíveis nos tamanhos de 36 a 58 mm.