- Vision-sensorer
- O2D vision-sensor
- Teknologi
Teknologi vision-sensor O2D
O2D i detaljer
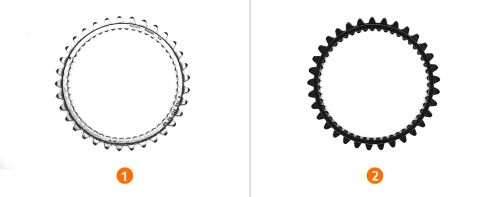
Konturverifikation
Konturdetektering er et vigtigt værktøj til 2D-billedbehandling. Kanterne og skift fra forgrund til baggrund detekteres, og der beregnes en kontur ud fra informationerne. Konturdetekteringen udmærker sig ved, at den også fungerer pålideligt, når lys trænger ind udefra, da fremmed lys som regel rammer hele objektet. Den relative forskel mellem forgrund og baggrund skifter, men konturen registreres stadig med lige stor sikkerhed. Objektinspektionen udføres herefter ved at matche en referencekontur med det aktuelle objekt.
Konturdetektering udføres ved hjælp af:
- Udtræk af objektet, der skal trækkes frem fra baggrunden, ved at justere lyset
- Optimering af konturen ved at slette unødvendige områder
- Algoritmen detekterer mulige konturer i live-billedet, som registreres som gode eller dårlige dele ud fra af en tærskelværdi (score)
Hvor anvendes konturdetektering:
Metoden bruges til detektering i mønstre og former samt til objektdetektering, typisk anvendt i udstansning, fræsning, drejning eller samling. Konturdetektering anvendes til kvalitetssikring på disse områder.
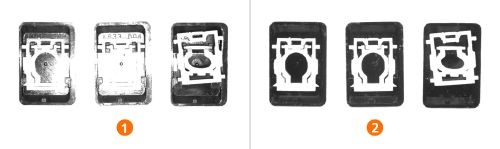
BLOB-analyse
BLOB-analyse er en vigtig billedbehandlingsmetode, hvor billedegenskaber udvælges og analyseres ved hjælp af en gruppe med lignende tilstødende pixels.
BLOB (konstrueret ord: Binary Large OBject) står i denne kontekst for Binary-Logic Data Object, som løst kan oversættes til et sæt pixels med den samme logiske tilstand. Udvælgelsen af de tilstødende pixels udføres generelt ved at fastsætte en gråskalatærskelværdi. Der kan drages konklusioner om de forskellige karakteristikker ud fra analysen. En kendt funktion er f.eks. pixel-tælleren.
BLOB-analyse udføres ved at:
- Trække interesseområdet ud fra baggrunden ved at danne en tærskelværdi over den grå værdi
- Optimere søgekriterier via forskellige attributter
- Beregne de søgte egenskaber, som f.eks. antal pixels (pixeltæller), områdetyngdepunkt, retning, form (f.eks. rundhed, rektangularitet) og diameter
Hvor anvendes BLOB-analysen?
Der er mange forskellige anvendelser. For eksempel kan BLOB-analyse anvendes til overvågning af fuldstændighed, detektering af tilstedeværelse eller gevinddetektering samt til tælling og sortering af objekter.
Positionssporing
Positions-tracking udføres vha. en ankerkontur, der findes én gang i billedet. Vha. denne kontur kan søgezoner tracke andre modeller (for eksempel en BLOB-analyses søgezone) i positionen og retningen.
Grafisk visning af en positions-tracking på grundlag af eksemplet:
Detektering af loddekugler på en clip

- Det skal kontrolleres, om alle tre loddekugler er til stede på spidsen af en clip (vist med grønt).
Eftersom en loddekugles kontur varierer, mens loddekuglens areal forbliver konstant, bruges en BLOB-analyse. Søgezonerne, der er vist med orange, defineres til overvågning af tilstedeværelsen over det område, der skal tjekkes. - For at spore disse søgezoner afhængigt af clippens position og retning, defineres en referencekontur - den såkaldte ankerkontur - (vist med pink). Konturen på clippens venstre runding ”forankres” med BLOB-analysens søgezoner.
- Hvis clippen for eksempel nu roterer 20 grader, findes ankerkonturen også i den roterede tilstand. BLOB-analysens søgezoner trackes nu automatisk til den korrekte position og retning.
O2D5-familien fra ifm anvender en CMOS-billedprocessor med 1,2 MP (1280 x 960 pixel).
- Hver pixel indeholder en foton, der indsamler og forstærker lys fra kameralinsen.
- Mikrolinser på hver pixel maksimerer fotonkontakten.
- Fotonen akkumulerer en elektrisk ladning proportional med mængden af lys, den modtager.
- Den elektriske ladning konverteres til et analogt spændingssignal.
- Det analoge signal sendes til en A/D-omformer.
- Billedprocessoren evaluerer hvert digitalt signal og sammensætter det til et billede.
CMOS-billedprocessorer er nemmere, hurtigere og billigere at fremstille, hvilket gør dem til de mest brugte på markedet.

For at maksimere kontrasten for hver pixel er det vigtigt at vælge den rigtige belysning. O2D-familien leveres med integrerede kraftige LED-lyskilder i RGB-W (rød, grøn, blå, hvid) og infrarød.
Bemærk, at billedsensoren ikke er en farvesensor!
At vælge en lyskilde med en anden farve kan dog have en dramatisk effekt på billedets kontrast. Billedet nedenfor viser farveblyanter i dagslys og er til sammenligning belyst med O2D5-sensorens forskellige LEDer.
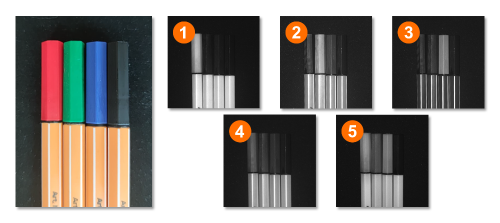
Sammenligning af de forskellige lyskilder
| Lystype | Bemærk: |
|---|---|
| Dagslys (reference) |
|
| Rødt lys |
|
| Grønt lys |
|
| Blåt lys |
|
| Hvidt lys |
|
| Infrarødt lys |
|
Polariseringsfiltrets effekt
På grund af refleksioner kan det være vanskeligt at få skarpe konturer eller områder på skinnende objekter. O2D5-sensorerne med RGB-W-lyskilder indeholder et polariseringsfilter, der kan aktiveres eller deaktiveres for at minimere refleksionernes effekt.
- uden polariseringsfilter
- med polariseringsfilter