- Senzori de înclinaţie
- Tehnologia
Tehnologia senzorilor de înclinare
“Nivela electronică cu bulă de aer”
Majoritatea senzorilor de înclinare (denumiți și inclinometre, senzori de înclinare sau de pantă) disponibili în prezent pe piață dispun de un accelerometru MEMS cu axă multiplă (MEMS = sistem micro-electro-mecanic).
Aceste tipuri de celule de măsurare sunt foarte mici, precise și robuste, dar și rezistente la uzură și întreținere.
Simplificat, o celulă de măsurare MEMS este compusă din două componente principale: o piesă electronică mobilă și o piesă mecanică fixă.
Piesa interioară mobilă, compusă dintr-o masă de dovadă (masă seismică), este echipată cu electrozi pe marginea exterioară, suspendați prin elemente cu arc.
Piesa exterioară fixă a celulei de măsurare este compusă și din acești electrozi.
Electrozii aflați la distanța minimă unii față de alții formează un “pieptene”.
Dacă senzorul se află într-o poziție orizontală, axa z a senzorului este, în mod normal, paralelă față de vectorul de împământare. Astfel, această valoare este “absolut” zero.
Dacă senzorul este înclinat într-o direcție, atunci masa mobilă din interior și electrodul acestuia își va schimba poziția față de electrodul fix.

Vizualizarea detaliată a unei celule MEMS
- Mișcare (= accelerație)
- Electrozi în pieptene cu o distanță de ~1,3 µm între ei
Modificarea rezultată a capacitanței dintre acești doi electrozi este detectată de celula de măsurare și este folosită pentru calcularea valorii unghiulare finale.
IMPORTANT!
Fiecare senzor de înclinare este livrat din fabrică cu o calibrare absolută.
Referința utilizată este vectorul gravitațional, așadar accelerația gravitațională, 1 g (= 9,81 m/s²).
Dacă o axă de măsurare a senzorului este paralelă sau congruentă cu vectorul de împământare, atunci nu poate avea loc măsurarea unghiului; senzorului îi lipsește orientarea în această poziție. Drept rezultat, nu este posibilă o măsurare directă a unghiului (detectarea rotației) în jurul axei verticale de referință (unghiul de girație). Cu toate acestea, unghiul de girație poate fi calculat indirect cu ajutorul unui PLC extern.
A se vedea “Funcționalitățile suplimentare ale senzorilor dinamici pentru înclinare [JDxxxx]”.
Definițiile unghiului
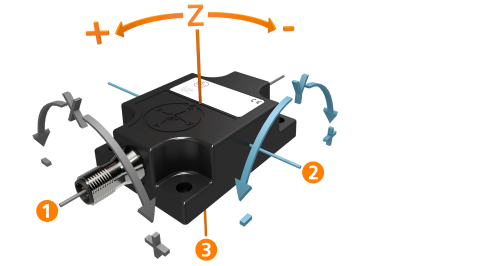
Definiția unghiului cu axa z pentru poziția zero = vector gravitațional
- Axa y “roll” (longitudinal) ⇒ unghiul x
- Axa x “pantă” (lateral) ⇒ unghiul y
- Axa z “girație” (vertical)⇒ unghiul z