- O3M 3D Smart Sensor – Oversikt
- Eksempler på anvendelse
- Hindringsdeteksjon og kollisjonsunngåelse
O3M 3D Smart Sensor – Hindringsdeteksjon og kollisjonsunngåelse
Hindringsdeteksjon og kollisjonsunngåelse
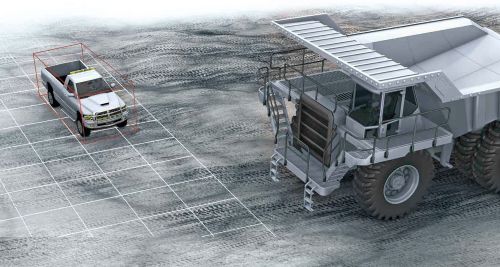
Den integrerte, automatiske gjenkjenningen av gjenstander oppdager opptil 20 stasjonære eller bevegelige objekter i veien til et anleggskjøretøy. Ved å sammenligne gjeldende hastighet, bevegelsesvektoren og faste parametere som bremselengde, beregnes kollisjonssannsynligheten av 3D-sensoren, overføres til maskinens kontrollsystem via CAN-buss eller Ethernet, og signaliseres deretter til sjåføren.
Deteksjon av hindringer
3D Smart-sensoren registrerer posisjonen og bevegelsen til objekter i synsfeltet. Disse dataene sendes deretter ut til kontrolleren.
Veiovervåking
Et fritt justerbart referansepunkt på kjøretøyet gjør at for eksempel bare hindringer med en forhåndsdefinert høyde over bakken kan oppdages som hindringer.
Førerstøtte på en containerstablekran
Automatisk forutsigelse av kollisjon støtter kranføreren med å endre posisjon og informerer om hindringer i banen.