- Vision érzékelők
- O2D típusú Vision érzékelő
- Technológia
O2D Vision érzékelő technológia
Tartalomjegyzék
Az O2D részletesen
Kontúrfelismerés
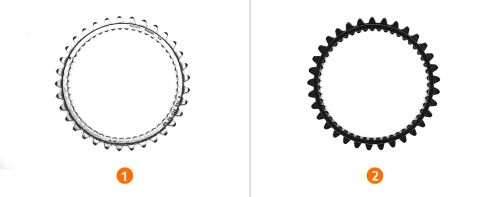
A kontúrfelismerés a 2D-s képfeldolgozás fontos eszköze. Ennek során az élek, valamint az előtér és a háttér közötti átmenetek kerülnek érzékelésre, és az információkból kiszámításra kerül a kontúr. A kontúrfelismerés különlegessége, hogy külső fény behatása esetén is megbízhatóan működik, mivel a külső fény általában a teljes objektumot éri. Az előtér és a háttér közötti relatív különbség eltolódik, de a kontúr továbbra is ugyanolyan biztonsággal felismerhető. A tárgyvizsgálás ezután egy referencia-kontúr és az aktuális objektum összevetésével történik.
A kontúrfelismerés a következő módon történik:
- A kiemelendő objektum kiemelése a háttérből a megvilágítási helyzet beállításával
- A kontúr optimalizálása a nem szükséges területek törlésével
- Az algoritmus felismeri az élő képen a lehetséges kontúrokat, melyeket egy küszöbérték (pontszám) alapján jó vagy nem megfelelő darabként különböztet meg
Hol alkalmazható a kontúrfelismerés:
Az eljárás elsősorban a minta- és alakfelismerés, valamint a tárgyfelismerés területén kerül alkalmazásra, jellemzően a lyukasztás, marás, esztergálás vagy összeszerelés során. A kontúrfelismerés ezeken a területeken a minőségbiztosítást szolgálja.
Blob-elemzés
A blobelemzés egy fontos képfeldolgozási módszer, melynek során a kép jellemzői a hasonló szomszédos képpontok egy csoportja alapján kerülnek kiválasztásra és elemzésre.
A BLOB (Binary Large Object) ebben a kontextusban a Binary-Logic Data Object (bináris logikai adatobjektum) rövidítése, ami szabad fordításban azonos logikai állapotú képpontok halmazát jelenti. A szomszédos képpontok kiválasztása általában a szürkeérték küszöbértékének meghatározásával történik. Az elemzésből ezután következtetéseket lehet levonni a különböző jellemzőkkel kapcsolatban. Egy jól ismert funkció például a pixelszámláló.
A blobelemzés a következőkkel végezhető el:
- Az érdekes terület kiemelése a háttérből a szürkeérték küszöbértékének meghatározásával
- A keresési feltételek optimalizálása különböző attribútumok segítségével
- A keresett jellemzők, pl. a pixelek száma (pixelszámláló), a terület középpontja, tájolása, alakja (pl. kerek, téglalap alakú) és átmérő kiszámítása
Hol alkalmazható a blobelemzés?
Számos különböző alkalmazás érhető el. A blobelemzés például teljesség-ellenőrzésre, jelenlét-ellenőrzésre vagy menet-felismerésre, valamint objektumok számolására és rendezésére használható.
Rétegkövetés
A helyzetkövetés egy horgony-kontúr segítségével történik, mely egyszer található meg a képen. E kontúr segítségével a keresési zónák más modellek (például egy blobelemzés keresési zónája) pozícióját, valamint a forgási pozíciót is követhetik.
A helyzetkövetés grafikus ábrázolása a példa alapján:
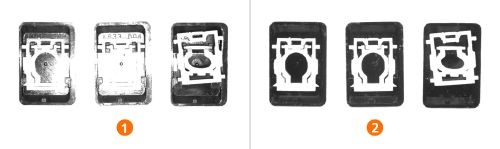
Forraszgolyók felismerése egy kapcson

- A kapocs hegyén ellenőrizni kell, hogy mindhárom forraszgolyó jelen van-e (zöld színnel jelölve).
Mivel a forraszgolyó kontúrja változik, de a forraszgolyó területe állandó marad, a blob-elemzés kerül alkalmazásra.A narancssárga színnel jelölt keresési zónák az ellenőrizendő területet érintő jelenlét-ellenőrzéshez vannak meghatározva. - Ahhoz, hogy ezeket a keresési zónákat a kapocs helyzetétől és elfordulásától függően követni lehessen, egy referencia-kontúr – az úgynevezett horgony-kontúr – kerül meghatározásra (rózsaszínnel jelölve).A kapocs bal oldali lekerekítésének kontúrja ezután a blobelemzés keresési zónáival „lehorgonyzásra” kerül.
- Ha a kapocs most pl. 20 fokkal elfordul, akkor a horgony-kontúr is elforgatott állapotban található. Ezután a blobelemzés narancssárga keresési zónái automatikusan a megfelelő pozícióba és forgáshelyzetbe kerülnek.
Az ifm O2D5 családja 1,2 MP (1280 x 960 pixel) CMOS képprocesszort használ.
- Minden egyes pixel egy fotont tartalmaz, amely összegyűjti és felerősíti a kamera lencséjéből érkező fényt.
- A mikrolencsék minden egyes pixelen maximalizálják a fotonokkal való érintkezést.
- A foton a fogadott fénymennyiséggel arányos elektromos töltést halmoz fel.
- Az elektromos töltés analóg feszültségjellé kerül átalakításra.
- Az analóg jel egy A/D átalakítóhoz kerül továbbításra.
- A képprocesszor kiértékeli az egyes digitális jeleket, és képpé állítja össze azokat.
A CMOS képprocesszorokat egyszerűbb, gyorsabb és olcsóbb gyártani, ezért a piacon a legszélesebb körben kerülnek alkalmazásra.

A megfelelő megvilágítás kiválasztása az egyes pixelek kontrasztjának maximalizálása érdekében kritikus fontosságú. Az O2D család integrált nagy intenzitású RGB-W (piros, zöld, kék, fehér) és infravörös LED fényforrásokkal rendelkezik.
Vegye figyelembe, hogy a képszenzor nem színérzékelő!
Egy más színű fényforrás kiválasztása azonban drámai hatással lehet a kép kontrasztjára. Az alábbi képen színes ceruzák láthatók nappali fényben és ugyanezek a ceruzák az O2D5 érzékelő különböző LED-jei által megvilágítva.
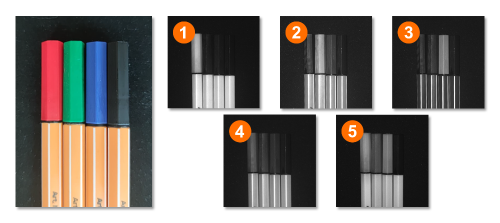
A fényforrások összehasonlítása
| Fénytípus | Vegye figyelembe: |
|---|---|
| Nappali fény (referencia) |
|
| Vörös fény |
|
| Zöld fény |
|
| Kék fény |
|
| Fehér fény |
|
| Infravörös fény |
|
A polarizációs szűrő hatása
A visszaverődések miatt nehéz lehet éles kontúrokat vagy területeket kapni a fényes objektumokon. Az RGB-W fényforrással ellátott O2D5 érzékelők tartalmaznak egy polarizációs szűrőt, amely be- vagy kikapcsolható a visszaverődések hatásának minimalizálása érdekében.
- polarizációs szűrő nélkül
- polarizációs szűrővel