- 3D-smartgivare O3M
- Program
- Kollisionsprognostisering
3D-smartgivare O3M – hinderdetektering och kollisionsprognostisering
Hinderdetektering och kollisionsprognostisering
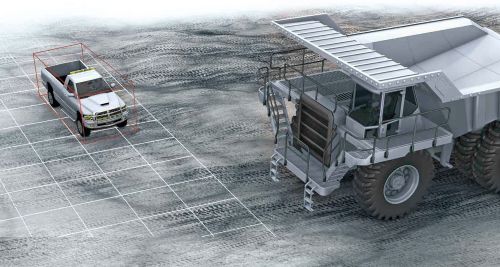
Den integrerade automatiska objektdetekteringen detekterar upp till 20 fastna eller rörliga objekt i fordonets väg. Med hjälp av den aktuella hastigheten, rörelsevektorn och fasta parametrar, som t.ex. för bromssträckan, beräknas sannolikheten för kollision av 3D-givaren och överförs via CAN-buss eller Ethernet till maskinstyrningen som signalerar den för föraren.
Hinderdetektering.
3D-smartgivaren detekterar positionen och rörelser för objekt i dess bildfält. Dessa data matas därefter ut till styrsystemet.
Körrörelseövervakning.
Med hjälp av en fritt inställbar referenspunkt på fordonet identifieras endast objekt som hinder om de t.ex. har en på förhand definierad höjd över markytan.
Förarassistent på en containerkran.
Den automatiska kollisionsprognostiseringen hjälper kranföraren vid positionsbyten och informerar om hinder på vägen.