- Hellingsensoren
- Technologie
Technologie van hellingsensoren
De "elektronische waterpas"
De overgrote meerderheid van de hellingsensoren (ook wel hellinggever, hoekgever of hoeksensor genoemd) die tegenwoordig op de markt zijn, zijn uitgerust met een MEMS-versnellingsmeter (MEMS = micro-electro-mechanical-system) voor meerdere assen.
Dit type meetcel is zeer klein, zeer nauwkeurig, bijzonder robuust en tegelijkertijd slijtage- en onderhoudsvrij.
Eenvoudig uitgelegd bestaat elke MEMS-meetcel uit twee hoofdcomponenten:een beweeglijk elektronisch deel en een vast mechanisch deel.
Het beweeglijke interne deel, bestaande uit een testmassa (seismische massa) is aan de buitenrand voorzien van elektroden, opgehangen aan veerelementen.
Het vaste, externe element van de meetcel is eveneens voorzien van elektroden.
Deze elektroden vormen een soort kam met de kleinst mogelijke onderlinge afstand.
Bevindt de sensor zich in een horizontale positie, dan is de Z-as van de sensor gewoonlijk evenwijdig met de aardvector. De waarde ervan is dus absoluut nul.
Wordt de sensor in een richting gekanteld, dan verandert de positie van de beweeglijke massa in het binnenste en zodoende ook die van zijn elektroden ten opzichte van de vaste elektroden.

Detailaanzicht MEMS-cel
- Beweging (= versnelling)
- Elektrodenkam met een onderlinge afstand van ~1,3 µm.
De resulterende verandering in capaciteit tussen deze twee elektroden wordt geregistreerd door de meetcel en is de basis voor verdere berekening tot een uiteindelijke hoekstand.
BELANGRIJK!
Elke hellingsensor is af fabriek absoluut gekalibreerd.
De referentie hiervoor is de gravitatievector, d.w.z. de versnelling door de zwaartekracht, 1 g (= 9,81 m/s²).
Indien een meetas van de sensor evenwijdig of congruent is met de aardvector, kan geen hoekmeting meer plaatsvinden, de sensor is in deze positie gedesoriënteerd. Een directe hoekmeting (rotatiedetectie) om de verticale referentiedraaiingsas (de zogenaamde gierhoek) is derhalve niet mogelijk.Via omwegen kan deze gierhoek echter indirect en extern in een PLC worden berekend.
Zie "Extra functies van de dynamische hellingsensor [JDxxxx]".
Hoekdefinities
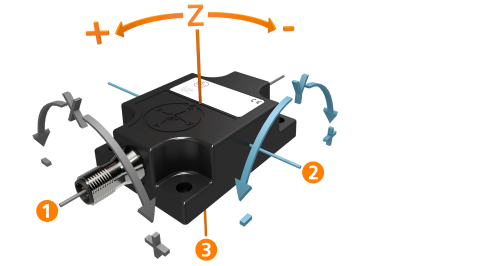
Hoekdefinities bij nulstand Z-as = gravitatievector
- Y-as "Roll" (longitudinaal) ⇒ hoek X
- X-as "Pitch" (lateraal)⇒ Hoek Y
- Z-as "Yaw" (verticaal)⇒ hoek Z