- Capteurs de vision
- Capteur de vision du type O2D
- Technologie
Technologie du capteur de vision O2D
O2D en détail
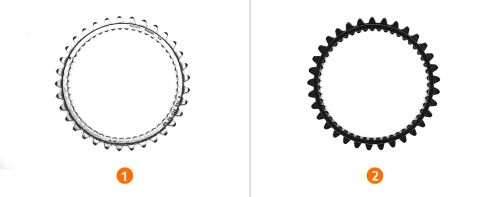
Détection de contours
La détection de contours est un élément important pour le traitement d’images 2D. Les bords ainsi que les transitions entre le premier plan et l’arrière-plan sont détectés et un contour est calculé à partir de ces informations. La particularité de la détection de contours, c’est qu’elle fonctionne également de manière fiable en présence d’une lumière parasite, car cette dernière affecte généralement l’ensemble de l’objet. Tandis que la différence relative entre le premier plan et l’arrière-plan change, le contour est toujours détecté de manière fiable. L’inspection d’objets est ensuite effectuée en comparant un contour de référence avec l’objet actuel.
La détection de contours est effectuée par :
- L’extraction de l’objet à mettre en valeur de l’arrière-plan en ajustant la situation d’éclairage
- L’optimisation du contour en effaçant les zones inutiles
- Dans l’image en temps réel, l’algorithme détecte les contours possibles qui sont alors distingués en pièces correctes ou non correctes sur la base d’une valeur seuil (score)
Où la détection de contours s’applique-t-elle?
La méthode est principalement utilisée dans la reconnaissance de profils et de formes ainsi que dans la détection d’objets, comme c’est typiquement le cas dans le poinçonnage, le fraisage, le tournage ou l’assemblage. Dans ces domaines, la détection de contours est utilisée pour l’assurance qualité.
Analyse de blob
L’analyse de blob est une importante méthode de traitement d’image pour sélectionner et analyser les caractéristiques d’une image sur un groupe de pixels voisins similaires.
Dans ce contexte, le terme BLOB (Binary Large Object, un néologisme anglais) signifie objet de données logique binaire, ce qui se traduit approximativement par un ensemble de pixels ayant le même état logique. La sélection des pixels voisins se fait généralement par un seuillage de la valeur de gris. L’analyse permet ensuite de tirer des conclusions sur les diverses caractéristiques. Une fonction bien connue est, par exemple, le compteur de pixels.
L’analyse de blob est effectuée par :
- L’extraction de la zone d’intérêt de l’arrière-plan par un seuillage sur la valeur de gris
- L’optimisation des critères de recherche via divers attributs
- Le calcul des caractéristiques recherchées, telles que le nombre de pixels (compteur de pixels), le centre de la surface, l’orientation, la forme (par exemple, rondeur, rectangularité) et le diamètre
Où l’analyse de blob s’applique-t-elle ?
Il existe de nombreuses applications différentes. Par exemple, l’analyse de blob peut être utilisée pour contrôler l’intégrité et la présence d’objets, pour détecter des filetages, ou bien compter et trier des objets selon leurs caractéristiques.
Suivi de position
Le suivi de position est effectué à l’aide d’un contour d’ancrage. Celui-ci est trouvé une seule fois dans l’image. Grâce à ce contour, les zones de recherche d’autres modèles peuvent être suivies (par exemple, la zone de recherche d’une analyse de blob) tant en position qu’en orientation.
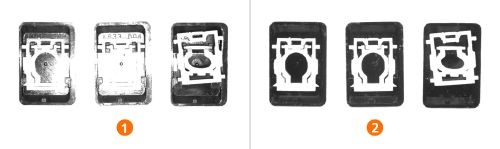
Représentation graphique d’un suivi de position basé sur l’exemple :
Détection de points de soudure sur un clip

- Vérification si les trois points de soudure (indiqués en vert) sont présents sur les pointes d’un clip.
Étant donné que le contour d’un point de soudure varie, mais que sa surface reste constante, une analyse de blob est utilisée.Les zones de recherche indiquées en orange pour le contrôle de présence sont définies dans la zone à contrôler. - Afin de suivre ces zones de recherche en fonction de la position et de la rotation du clip, un contour de référence - appelé contour d’ancrage - est défini (représenté en rose).Le contour de l’arrondi gauche du clip est ensuite "ancré" avec les zones de recherche de l’analyse de blob.
- Si le clip tourne de 20 degrés, par exemple, le contour d’ancrage est également trouvé dans cet état de rotation. Les zones de recherche oranges de l’analyse de blob sont ensuite automatiquement suivies jusqu’à la position et l’orientation correctes.
La famille O2D5 d’ifm utilise un processeur d’image CMOS de 1,2 MP (1280 x 960 pixels).
- Chaque pixel contient un photon qui collecte et amplifie la lumière provenant de l’objectif de la caméra.
- Des microlentilles sur chaque pixel maximisent le contact de photon.
- Le photon accumule une charge électrique proportionnelle à la quantité de lumière qu’il reçoit.
- La charge électrique est convertie en un signal de tension analogique.
- Le signal analogique est transmis à un convertisseur analogique/numérique.
- Le processeur d’image évalue chaque signal numérique et produit une image.
Les processeurs d’image CMOS sont plus faciles, plus rapides et moins chers à fabriquer, et sont ainsi les plus répandus sur le marché.

Il est essentiel de choisir le bon éclairage pour maximiser le contraste de chaque pixel. La famille O2D est fournie complète avec des sources lumineuses LED de haute intensité intégrées en RGB-W (rouge, vert, bleu, blanc) et infrarouge.
Notez que le capteur d’images n’est pas un capteur de couleurs !
Toutefois, le choix d’une source lumineuse d’une autre couleur peut avoir un effet dramatique sur le contraste de l’image. L’image ci-dessous montre des crayons de couleur à la lumière du jour et ces mêmes crayons éclairés par les différentes LED du capteur O2D5.
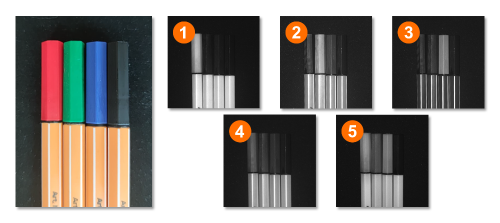
Comparaison des sources lumineuses
| Type de lumière | A noter : |
|---|---|
| Lumière du jour (référence) |
|
| Lumière rouge |
|
| Lumière verte |
|
| Lumière bleue |
|
| Lumière blanche |
|
| Lumière infrarouge |
|
Effet du filtre polarisant
En raison des reflets, il peut être difficile d’obtenir des contours ou des zones nettes sur des objets brillants. Les capteurs O2D5 avec sources lumineuses RGB-W contiennent un filtre de polarisation qui peut être activé ou désactivé afin de minimiser l’effet des réflexions.
- sans filtre de polarisation
- avec filtre de polarisation