- Rozpoznawanie obiektów 3D
- Platforma robotyki O3R
Platforma O3R Perception
Platforma percepcyjna w skrócie
Platforma percepcyjna O3R to bramka z wieloma czujnikami i kamerami o rozmiarach i strukturze kosztów produktów konsumenckich - z długoterminową dostępnością i wytrzymałością produktów przemysłowych. Do jednostki centralnej można podłączyć do sześciu głowic kamer za pośrednictwem łącza FPD, a dodatkowe czujniki, takie jak radar lub lidar, można podłączyć za pośrednictwem interfejsu Gigabit Ethernet. Dzięki elastycznemu położeniu i rozmieszczeniu instalacji można skanować różne obszary i na przykład zapobiegać kolizjom z przeszkodami, które wystają na drogę przejazdu ponad pole widzenia skanera bezpieczeństwa.
Potężna centralna jednostka obliczeniowa dla krawędzi oferuje wystarczająco dużo miejsca na uruchamianie własnych algorytmów lub korzystanie z gotowych funkcji, takich jak unikanie kolizji lub wykrywanie palet.
Zagadnienia
Najwyższy stopień automatyzacji w przemyśle motoryzacyjnym
Branża pojazdów autonomicznych (AV) dąży do osiągnięcia poziomu 5 autonomii, czyli pełnej automatyzacji, w której nie jest wymagana interakcja z kierowcą, co pozwoliłoby na zakup pojazdu AV przez przeciętnego konsumenta.
- Producenci zdają sobie sprawę, że osiągnięcie poziomu 5 jest możliwe tylko dzięki pakietowi percepcyjnemu, który umożliwia pojazdowi lepsze postrzeganie otoczenia.
- Wielomodalne podejście do percepcji wokół pojazdu.
- Każda modalność jest zaprojektowana tak, aby przezwyciężyć „słabość" innej modalności, tworząc solidną platformę dla najlepszej w swojej klasie świadomości otoczenia.
Wyzwania w robotyce mobilnej
Autonomia nie jest nowością w robotyce mobilnej (po raz pierwszy wprowadzono ją w latach 50-tych XX wieku).
- W odróżnieniu od branży AV, barierą dla wykorzystania robotów mobilnych są koszty.
- Wprowadzenie robotów mobilnych wymaga dużych inwestycji ze strony użytkownika, co wydłuża czas potrzebny na osiągnięcie znacznego zwrotu z inwestycji.
- Producenci są zmuszeni do kompromisów w doborze sprzętu, koncentrując się przede wszystkim na bezpieczeństwie, w celu obniżenia kosztu BoM.
- Ostatecznie ogranicza to ogólną elastyczność robota, co z kolei zmniejsza jego możliwości.
A gdyby nie trzeba było iść na kompromis?
Przykład z literatury dotyczącej pojazdów AV
Branża AV nie myli się w swoim podejściu do osiągnięcia poziomu 5 autonomii.Większa świadomość ekologiczna prowadzi do większej elastyczności i lepszego ogólnego funkcjonowania pojazdu AV.Takie same możliwości powinna posiadać branża robotów mobilnych.
Aby stało się to rzeczywistością, należy pokonać wyzwania związane z zastosowaniami wielomodalnymi i wielokamerowymi, w tym synchronizację i fuzję czujników.Jedynym sposobem na obniżenie całkowitego kosztu posiadania platform percepcyjnych jest uproszczenie projektowania i integracji systemów wielomodalnych.
Platforma percepcyjna O3R została zaprojektowana tak, aby spełniać to zadanie.
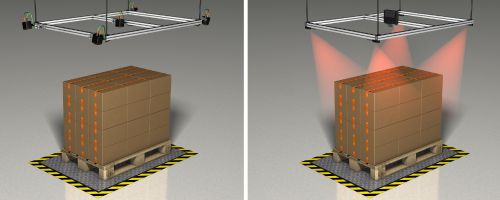
Platforma O3R jest kompleksowym rozwiązaniem do scentralizowanego, zsynchronizowanego przetwarzania obrazów i informacji z czujników w autonomicznych robotach mobilnych, takich jak AGV. Uproszczona integracja i niezawodne współdziałanie kamer i czujników umożliwia sprawną realizację istotnych funkcji, takich jak unikanie kolizji, nawigacja i pozycjonowanie. Ponadto możliwe jest analizowanie i wymiarowanie obiektów stacjonarnych, które jest bardziej efektywne dzięki zastosowaniu kilku kamer. Przykładem może być pomiar palet, bali, paczek lub walizek.
Głowica kamery z przetwornikiem obrazu opracowanym we własnym zakresie

Firma ifm oferuje odpowiednie, wysokowydajne głowice kamer jako część rozwiązania platformowego: Kamery 2D/3D mają opcjonalnie kąt apertury 60° lub 105° i są wyposażone w najnowszy przetwornik obrazu typu time-off-light firmy pmdtechnologies ag. Ta należąca do grupy ifm firma opracowuje wszystkie czujniki dla produktów wizyjnych firmy specjalizującej się w automatyce i precyzyjnie dostosowuje je do odpowiednich wymagań. Dzięki modulowanemu światłu podczerwonemu kamera 2D/3D wykrywa obiekty z maksymalną niezawodnością, nawet przy zwiększonej ekspozycji na światło otoczenia.
Potężna i otwarta: jednostka centralna do przetwarzania sygnałów sensorycznych

Rdzeniem systemu jest potężna jednostka obliczeniowa o nazwie Video Processing Unit (VPU). Jest ona oparta na systemie Yocto Linux i platformie NVIDIA Jetson TX2 oraz obsługuje otwarte środowiska programistyczne, takie jak ROS i Docker. Do jednostki obliczeniowej można podłączyć maksymalnie sześć głowic kamer. Dodatkowe czujniki, takie jak czujniki ultradźwiękowe do wykrywania powierzchni szklanych, takich jak drzwi lub ścianki działowe, można podłączyć za pośrednictwem interfejsu Gigabit Ethernet. W ten sposób wszystkie istotne „zmysły" potrzebne AGV do bezpiecznej autonomicznej nawigacji są dostępne w jednym centralnym punkcie.
Architektura oprogramowania O3R ułatwia zarówno wstępne prace rozwojowe, jak i rozwój serii dzięki bogatemu wyborowi narzędzi programistycznych i obsłudze licznych interfejsów. Dzięki zastosowaniu architektury Docker, obsługiwane są otwarte środowiska programistyczne, takie jak Python, ROS, CUDA i C++.
| Linux jest najczęściej stosowanym systemem operacyjnym w robotyce.Urządzenia pomocnicze muszą posługiwać się tym samym językiem. | |
| Kontenery pozwalają programiście na pełną elastyczność w zakresie języka programowania i środowiska. Czas tworzenia oprogramowania jest krótszy, gdy używa się znanego środowiska. | |
 |
ROS jest powszechnie używanym oprogramowaniem pośredniczącym.ROS2 zapewnia możliwość przejścia od fazy rozwoju do fazy wdrożenia. |
| Potężne narzędzia, takie jak CUDA i Jetpack, można w pełni wdrożyć na jednostkach VPU firmy NVIDIA. |