O2D-synssensorens teknologi
O2D i detalj
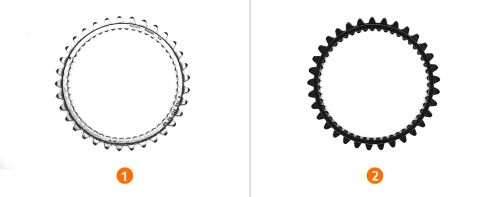
Konturverifisering
Konturdeteksjon er et viktig verktøy for 2D-bildebehandling. Kantene og overgangene fra forgrunnen til bakgrunnen oppdages, og en kontur beregnes ut fra informasjonen. Det unike med konturdeteksjon er at det fungerer pålitelig med interferens forårsaket av fremmedlys, da lyset utenfor vanligvis treffer hele objektet. Den relative forskjellen mellom forgrunn og bakgrunn skifter, men konturen oppdages fortsatt med like stor sikkerhet. Objektinspeksjon utføres deretter ved å matche en referansekontur med det aktuelle objektet.
Konturdeteksjon ved hjelp av:
- Trekk ut objektet som skal fremheves fra bakgrunnen ved å justere lyssituasjonen
- Optimalisering av konturen ved å slette unødvendige områder
- Algoritmen oppdager mulige konturer i det levende bildet som skilles ut som gode eller dårlige deler på grunnlag av en terskelverdi (score)
Hvor gjelder konturdeteksjon:
Metoden brukes hovedsakelig i mønster- og formdeteksjon og gjenkjenning av objekter, som vanligvis brukes ved stansing, fresing, dreiing eller montering. Konturdeteksjon brukes for kvalitetssikring i disse områdene.
Blobanalyse
Blob-analyse er en nødvendig metode til bildebehandling der bildefunksjoner velges og analyseres over en gruppe med lignende nabopiksler.
I denne sammenhengen står BLOB (oppfunnet ord Binary Large Object) for Binary-Logic Data Object, som løst oversettes som et sett med piksler med samme logiske tilstand. Valget av nabopiksler gjøres vanligvis ved å terskelgrense gråskalaverdien. Det kan da trekkes konklusjoner om ulike kjennetegn fra analysen. En velkjent funksjon er f.eks. pikseltelleren.
Blobanalyse ved hjelp av:
- Blob-analyse ved hjelp av:
- Optimalisering av søkekriteriene via ulike attributter
- Beregning av egenskapene det søkes etter, slik som antall piksler (pikselteller), tyngdepunkt i området, orientering, form (f.eks. rundhet, rektangulærhet) og diameter
Hvor gjelder blob-analysen?
Det er mange forskjellige applikasjoner. Blob-analyse kan for eksempel brukes til å overvåke fullstendighet, tilstedeværelse eller tråddeteksjon, og telle og sortere objekter.
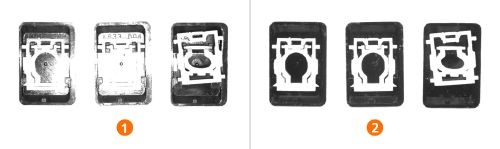
Posisjonssporing
Sporing af posisjon gjøres ved å bruke en ankerkontur som ble funnet én gang i bildet. Ved å bruke denne konturen kan søkesoner spore andre modeller (for eksempel søkesonen til en blobanalyse) både i posisjon og orientering.
Grafisk representasjon av en posisjonssporing basert på eksemplet:
Deteksjon av loddekuler på et klips

- På spissen av en klemme må det kontrolleres om alle tre loddekulene er tilstede (vist i grønt).
Siden konturen til en loddekule varierer, men arealet til en loddekule forblir konstant, brukes en blob-analyse. Søkesonene i oransje er definert for overvåking av tilstedeværelse over stedet som skal kontrolleres. - For å spore disse søkesonene avhengig av klemmens posisjon og orientering, defineres en referansekontur - den såkalte ankerkonturen - (vist i rosa). Formen på venstre avrunding av klemmen "forankres" med søkesonene til blobanalysen.
- Hvis klemmen nå roterer 20 grader, finnes også ankerkonturen i rotert tilstand. De oransje søkesonene til klumpanalysen spores deretter automatisk til riktig posisjon og orientering.
O2D5-familien fra ifm bruker en CMOS-bildeprosessor med 1,2 MP (1280 x 960 piksler).
- Hver piksel inneholder et foton som samler og forsterker lys fra kameralinsen.
- Mikrolinser på hver piksel maksimerer fotonkontakt.
- Fotonet akkumulerer en elektrisk ladning proporsjonal med mengden lys det mottar.
- Den elektriske ladningen omdannes til et analogt spenningssignal.
- Det analoge signalet overføres til en A/D-omformer.
- Bildeprosessoren evaluerer hvert digitalt signal og setter det sammen til et bilde.
CMOS-bildeprosessorer er enklere, raskere og billigere å produsere, noe som gjør dem til de mest brukte på markedet.

For å maksimere kontrasten for hver piksel er det viktig å velge riktig belysning. O2D-familien leveres med integrerte høyintensitets LED-lyskilder i RGB-W (rød, grønn, blå, hvit) og infrarød.
Vær oppmerksom på at bildesensoren ikke er en fargesensor!
Men å velge en lyskilde med en annen farge kan ha en dramatisk effekt på kontrasten i bildet. Bildet nedenfor viser fargestifter i dagslys og, til sammenligning, opplyst av de forskjellige lysdiodene til O2D5-sensoren.
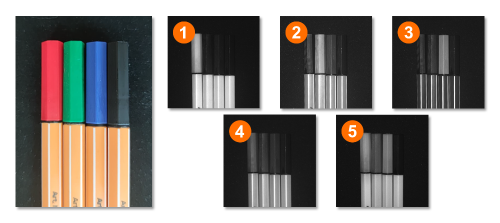
Sammenligning av de forskjellige lyskildene
| Lystype | Vennligst merk: |
|---|---|
| Dagslys (referanse) |
|
| Rødt lys |
|
| Grønt lys |
|
| Blått lys |
|
| Hvitt lys |
|
| Infrarødt lys |
|
Effekt av polarisasjonsfilteret
På grunn av refleksjoner kan det være vanskelig å få skarpe konturer eller områder på blanke gjenstander. O2D5-sensorene med RGB-W-lyskilder inneholder et polariseringsfilter som kan slås på eller av for å minimere effekten av refleksjoner.
- uten polariseringsfilter
- med polariseringsfilter