- Capteurs d’inclinaison
- Technologie
Technologie des capteurs d’inclinaison
Le «niveau à bulle électronique»
Aujourd’hui, la grande majorité des capteurs d’inclinaison (appelés inclinomètres) disponibles sur le marché sont équipés d’un accéléromètre MEMS multi-axes (MEMS = système microélectromécanique).
Ces types de cellules de mesure MEMS sont très petits, très précis, particulièrement robustes, mais aussi sans usure ni entretien.
En termes simples, chaque cellule de mesure MEMS est constituée de deux composants principaux:une pièce électronique mobile et une pièce mécanique fixe.
La pièce interne mobile, composée d’une masse étalon (masse sismique) est équipée sur son bord extérieur d’électrodes suspendues par des ressorts.
La partie extérieure fixe de la cellule de mesure en est également équipée.
Les électrodes, situées à une distance minimale les unes des autres, forment une sorte de peigne.
Si le capteur est en position horizontale, son axe Z est généralement parallèle au vecteur terrestre. Sa valeur correspond alors au zéro absolu.
Si le capteur est incliné dans une direction, la position de la masse mobile à l’intérieur ainsi que ses électrodes est modifiée par rapport aux électrodes fixes.

Vue détaillée d’une cellule MEMS
- Mouvement (= accélération)
- Peigne d’électrodes avec un espacement de ~1,3 µm
Le changement de capacité apparaissant entre ces deux électrodes est détectée par la cellule de mesure et sert de base pour calculer la valeur finale de l’angle.
IMPORTANT!
Chaque capteur d’inclinaison est fourni avec un étalonnage absolu effectué en usine.
La référence utilisée est le vecteur de gravitation, c’est-à-dire l’accélération due à la gravité, 1g (= 9,81 m/s²).
Si un axe de mesure du capteur est parallèle ou superposé au vecteur terrestre, la mesure d’angle n’est pas possible. Dans cette position, le capteur n’a pas d’orientation. Une mesure d’angle directe (détection de rotation) sur l’axe vertical de référence («angle de lacet») n’est donc pas possible.Cet angle de lacet peut toutefois être calculé de manière indirecte via une API externe.
Voir «Fonctions complémentaires du capteur d’inclinaison dynamique [JDxxxx]».
Définitions des angles
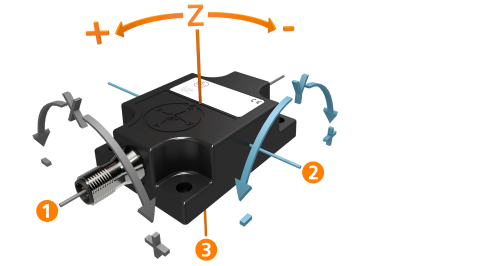
Définition des angles en position zéro axe Z = vecteur de gravitation
- Axe Y «roulis» (longitudinal) ⇒ angle X
- Axe X «tangage» (latéral)⇒ angle Y
- Axe Z «lacet» (vertical)⇒ angle Z