- Сензори за наклона
- Технология
Технология на сензорите за наклон
Електронният нивелир
Повечето от сензорите за наклон (известни също като инклинометри), налични днес на пазара, имат многоосен акселерометър с MEMS (MEMS= microelectromechanical system (микроелектромеханична система).
Тези видове измервателни клетки са много малки, прецизни и здрави, както и неизносващи се и без нужда от техническо обслужване.
Казано по-просто, измервателните клетки с MEMS се състоят от два основни компонента: една подвижна електронна част и една фиксирана механична част.
Подвижната вътрешна част, състояща се от ускоряема (сеизмична) маса, снабдена с електроди на външния ръб, окачени на пружинни елементи.
Фиксираната външна част на измервателната клетка също има такива електроди.
електродите, разположени на минимално разстояние един от друг, образуват „гребен“.
Когато сензорът е в хоризонтално положение, оста Z на сензора обикновено е успоредна на вектора на земята. По този начин неговата стойност е абсолютна нула.
Ако сензорът се наклони в едната посока, подвижната маса вътре и нейният електрод ще променят позицията си спрямо фиксирания електрод.

Подробен изглед на MEMS клетка
- Движение (= ускорение)
- Елекроди, формиращи гребен ~1,3 µm разстояние един от друг
Получената промяна в капацитета между тези два електрода се отчита от измервателната клетка и се използва за изчисляване на окончателната стойност на ъгъла.
ВАЖНО!
Всеки сензор за наклон се доставя от фабриката абсолютно калибриран.
Използваният еталон е гравитационният вектор, т.е. гравитационното ускорение, 1g (= 9,81 m/s²).
Ако оста на измерване на сензора е успоредна или съвпадаща със земния вектор, не може да се извърши измерване на ъгъла; в това положение липсва ориентация на сензора. В резултат на това директно измерване на ъгъла (отчитане на въртене) около вертикалната референтна ос (вертикален ъгъл) не може да бъде направено. Но вертикалният ъгъл може да се изчисли индиректно чрез външен програмируем контролер.
Вижте „Допълнителни функции на динамичния сензор за наклон [JDxxxx]“.
Определения на ъглите
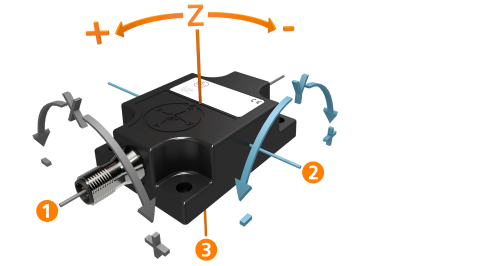
Определение на ъглите при нулево положение на ос Z = гравитационен вектор
- ос Y, (надлъжен) ⇒ ъгъл X
- ос X, (страничен) ⇒ ъгъл Y
- ос Z, (вертикален) ⇒ ъгъл Z