- Autonomous mobile robots
- Obstacle detection algorithm
Obstacle detection system: Achieve faster development and added value by increasing OEE
Modern industries face two critical challenges: A shrinking labor force and demands for increased productivity in industrial settings. Autonomous mobile robots are Industry 4.0 solutions to these problems. But, they're still limited. Improving obstacle detection for mobile robots is key to unlocking their potential.
ifm leverages decades of innovation and expertise to create state-of-the-art obstacle detection systems. More businesses can access mobile robots when ifm's solutions make them more efficient and accurate.
Benefits of ifm obstacle detection systems
Increased capability
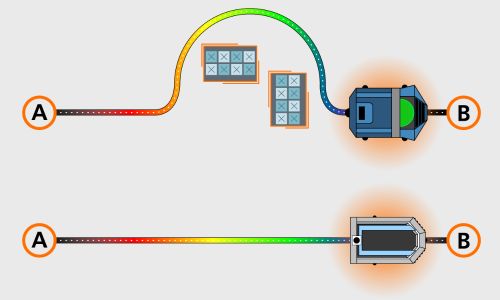
Our solution reliably detects small objects on the ground, such as fork tines, due to its robust floor segmentation.
Enhanced efficiency
Robots complete more missions each day because better object recognition and spatial awareness reduce unplanned stops.
Added value
Increased throughput makes a robot more valuable to the end-user. With BoM costs for AMRs remaining relatively static, reducing the number of units necessary for the job reduces CapEx for the customer.
Understanding Obstacle Detection
Obstacle detection is the ability to sense and adapt to obstructions in its desired path plan. In mobile robot automation, sensing technology and algorithms detect objects, walls, and other obstructions.
Early obstacle detection systems sent light signals or laser beams across a two-dimensional plane. They identified obstacles blocking the beam’s path. Robots then required human intervention when the system encountered an obstruction.
Enhanced perception enables better path planning decisions in today's detection systems.
Today’s innovations: Avoiding false positives
Thanks to decades of improvements, obstacle detection systems easily identify objects in the path of a robot. But newer technology gathers much more information. As a result, avoiding false positives is now a crucial focus for ifm.
A false positive occurs when the system flags a nonexistent obstacle. This phenomenon often occurs when the software can’t distinguish between the floor and an object or a reflection from the environment (e.g. shiny metal or dust).
That results in less efficiency and increased downtime. The robot stops for no reason and requires human intervention to resume its route.


Robot availability
Fewer unplanned stops increase availability.
Robot performance
Better environmental understanding improves performance.
Facilities need fewer robots to meet throughput demands when each unit's OEE rises through fewer unplanned stops.
The future of obstacle detection for AMRs
Obstacle detection is key to making automated mobile robots more accessible to mid-size companies and more enterprise-level businesses. As the technology improves, obstacle detection systems will enable AMRs to have fewer unplanned stops, leading to more efficient missions.
Mobile robots operate more efficiently because ifm focuses on the physics engines behind 3D cameras and indirect time-of-flight systems. Its solutions increase operational efficiency for mobile robots.

Gain a competitive edge
Are you ready to take your mobile robot development to the next level? Fill out the form or contact Tim McCarver directly at tim.mccarver@ifm.com.