- Enkoderi
- Područja primjene
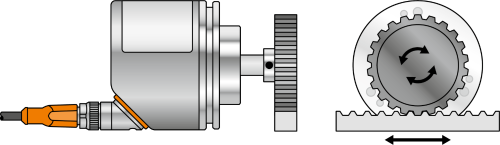
Rotacijski, visinski i linearni pokreti
Primjer: Određivanje visine podizanja pomoću apsolutnog višeokretnog enkodera na zupčaniku.
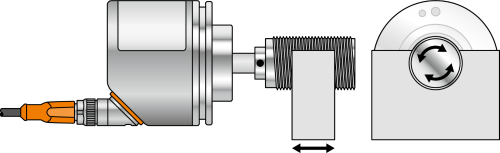
Rotacijski i daljinski pokreti
Primjer: Namještanje vretena za precizno postavljanje u položaj pomoću apsolutnog višeokretnog enkodera.
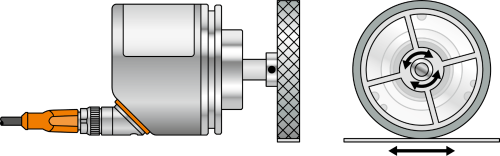
Rotacijski i linearni pokreti
Primjer: Linearna mjerenja pomoću inkrementalnog enkodera na mjernom kotaču.
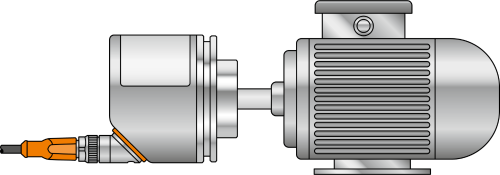
Rotacijski pokret za određivanje brzine
Primjer: Otkrivanje brzine rotacije motora pomoću inkrementalnog enkodera.
Rotacijski pokret za određivanje položaja
Primjer: Postavljanje rotacijskih indeksnih stolova u položaj za različite proizvodne korake pomoću apsolutnog jednookretnog enkodera.
Rotacijski pokret za određivanje kuta
Primjer: Otkrivanje kuta upravljanja za rad AGV-ova pomoću apsolutnog jednookretnog enkodera.
Upotreba na viličarima i AGV-ovima
Kompaktni višeokretni enkoder IO-Link posebno su prikladni za upotrebu na AGV-ovima i viličarima. Mala kućišta promjera 36 mm omogućuju postavljanje na malim površinama. Mogu se spojiti na sve uobičajene upravljačke uređaje pomoću mastera IO-Link vrste AL1xx i standardnog kabela M12. Zbog toga su skupi kabeli sabirnice polja koji se moraju sastaviti zastarjeli.
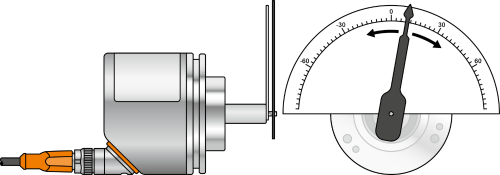
Prilagodba širine vilice
Širina vilice viličara namješta se pomoću zupčanika i zupčaste letve. Apsolutni enkoder postavljen na zupčaniku određuje točnu širinu vilice i javlja je upravljačkom uređaju.
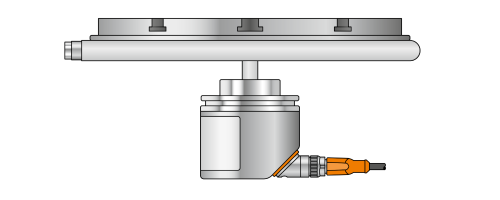
Visina vilice
Za precizno određivanje visine vilice, apsolutni enkoder otkriva okretaje na koloturu žičanog užeta i prenosi te informacije na jedinicu zaslona i upravljački uređaj.
Pogonski kotač i upravljač
U sustav upravljanja ugrađena su dva enkodera: Dok jedan precizno određuje kut upravljanja kotača, drugi se nalazi na osovini pogonskog motora, pružajući dvije procesne vrijednosti: brzina okretaja u min-1i točan položaj kotača.
Ostali strojevi
Rezanje lima na stroju za bušenje
Beskonačan metalni lim prolazi kroz stroj i buši se na određene duljine. Fotoelektrični senzor gleda na prednji rub lima i pokreće postupak brojanja postavljanjem enkodera na mjernom kotaču na nulu pomoću signala za prebacivanje. Ovaj direktni ulaz za ponovno postavljanje na enkoderu poduzeća ifm znači da nema uključenosti PLC-a. Čak i u brzim postupcima, učinkovito se izbjegavaju vremenska kašnjenja i rezultirajuća mehanička odstupanja. Uz mjerenje duljine, enkoder IO-Link omogućuje brzinu trake kao drugu mjernu vrijednost.
Nadzor ventilatora
Postavljen na osovinu ventilatora, enkoder ne prati samo brzinu. Već i bilježi radne sate kako bi se optimizirali intervali održavanja.
Stroj za pakiranje termooblikovanjem
Transportna traka mora raditi sinkronizirano s uvedenim filmom. Enkoderi ugrađeni na mjerne kotače precizno prate brzinu i javljaju upravljačkom uređaju čak i najmanja odstupanja.
Valjčana prijenosna traka
Duge transportne linije sastoje se od pojedinačnih, zasebno vođenih segmenata. Kako bi se spriječili zastoji ili sudari, enkoderi su ugrađeni na osi pogona kako bi se zajamčilo da svi rade istom brzinom.
Viseći transporter
U klaonici se polovice trupova koje su obješene na kukama prenose s visećeg transportera na traku za skladištenje. Kako bi se zajamčio nesmetan prijenos, dva sustava moraju raditi apsolutno sinkronizirano. Enkoderi na oba sustava jamče savršenu sinkronizaciju sustava. Zahvaljujući svom kućištu V4A i stupnju zaštite IP68/69K, enkoderi mogu izdržati čak i ekstremne postupke čišćenja koji se upotrebljavaju u klaonicama.