- 3D-objektdetektering
- O3R-robotikplattformen
O3R Perception Platform
Perception platform i korthet
O3R perceptionplatform är en gateway med flera givare och kameror som har samma storlek och kostnadsstruktur som konsumentprodukter, men samma långsiktiga tillgänglighet och robusthet som industriprodukter. Upp till sex kamerahuvuden kan anslutas till den centrala processorenheten via FPD-länk, och ytterligare givare som radar eller lidar kan anslutas via Gigabit Ethernet-gränssnittet. Med det flexibla monteringsläget och arrangemanget kan olika områden skannas och till exempel kan kollisioner med hinder som sticker ut i körbanan ovanför säkerhetsskannerns synfält förhindras.
Den kraftfulla centrala edge-beräkningsenheten erbjuder tillräckligt med utrymme för att köra dina egna algoritmer eller använda färdiga funktioner som kollisionsundvikande eller palldetektering.
Ämnen
Högsta graden av automatisering inom fordonsindustrin
Industrin för autonoma fordon (AF) strävar efter att uppnå nivå 5 av autonomi, det vill säga full automatisering där ingen interaktion med föraren krävs, vilket skulle göra det möjligt för en allmän konsument att köpa ett AF.
- Tillverkarna inser att nivå 5 endast kan uppnås meden perceptionsstack som gör det möjligt för fordonet att bättre uppfatta sin omgivning.
- Multimodalt tillvägagångssätt för att uppfatta fordonets omgivning.
- Varje modalitet är utformad för att övervinna svagheterna hos en annan modalitet, vilket skapar en robust plattform för den bästa miljömedvetenheten i klassen.
Utmaningar inom mobil robotteknik
Autonomi är inget nytt för mobila robotar (den introducerades för första gången på 1950-talet).
- Till skillnad från i AF-industrin är kostnaderna ett hinder för införandet av mobila robotar.
- Ingångspunkter för mobila robotar kräver en stor investering från användarens sida, vilket gör att det tar längre tid att få bra avkastning på investeringen.
- Tillverkarna tvingas kompromissa när det gäller valet av hårdvara, med fokus främst på säkerhet, för att minska BoM-kostnaderna.
- I slutändan begränsar detta robotens totala flexibilitet, vilket i sin tur minskar dess kapacitet.
Tänk om du inte behövde kompromissa?
Taen sida från "AF-boken"
AF-branschen har inte fel i sin strategi för att nå nivå 5-autonomi.Bättre miljömedvetenhet leder till större flexibilitet och bättre drift av ett AF.Samma möjlighet bör finnas för industrin för mobila robotar.
För att detta ska kunna bli verklighet måste svårigheterna i multimodala applikationer med flera kameror övervinnas, inklusive synkronisering och fusion av sensorer.Det enda sättet att minska den totala ägandekostnaden för perception platform är att förenkla utformningen och integrationen av multimodala system.
O3R perception platform har utformats för att klara denna uppgift.
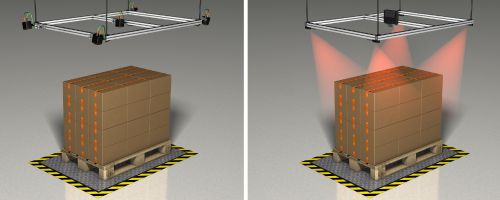
O3R platform är en heltäckande lösning för centraliserad, synkroniserad behandling av bild- och sensorinformation i autonoma mobila robotar, till exempel AGV-truckar. Den förenklade integrationen och den tillförlitliga interaktionen mellan kameror och sensorer gör det möjligt att införa relevanta funktioner som kollisionsundvikande, navigering och positionering på ett robust sätt. Dessutom kan analys och dimensionering av stationära objekt utföras och hanteras mer effektivt med hjälp av flera kameror. Exempel är mätning av pallar, stockar, paket eller resväskor.
Kamerahuvud med egenutvecklad bildsensor

ifm erbjuder lämpliga, högpresterande kamerahuvuden som en del av plattformslösningen: 2D/3D-kamerorna finns med en öppningsvinkel på 60 eller 105 grader och är utrustade med den senaste flygtidsbildgeneratorn från pmdtechnologies ag. Detta företag i ifm-koncernen utvecklar alla givare för automationsspecialistens optiska produkter och anpassar dem exakt till respektive krav. Tack vare det modulerade infraröda ljuset detekterar 2D/3D-kameran objekt med maximal tillförlitlighet även vid ökad exponering för omgivande ljus.
Kraftfull och öppen: den centrala enheten för sensorisk bearbetning

Kärnan i systemet är en kraftfull beräkningsenhet som kallas VPU (Video Processing Unit). Den är baserad på Yocto Linux och NVIDIA Jetson TX2 och stöder öppna utvecklingsmiljöer som ROS och Docker. Upp till sex kamerahuvuden kan anslutas till beräkningsenheten. Ytterligare sensorer, till exempel ultraljudsgivareför detektering avglasytor som dörrar eller skiljeväggar, kan anslutas via ett Gigabit Ethernet-gränssnitt. Alla relevanta "sinnen" som en AGV behöver för säker autonom navigering finns alltså tillgängliga på en central plats.
O3R:s mjukvaruarkitektur underlättar både förutveckling och serieutveckling genom ett stort urval av mjukvaruverktyg och stöd från många gränssnitt. Genom användning av en Docker-arkitektur stöds öppna utvecklingsmiljöer som Python, ROS, CUDA och C++.
| Linux är det vanligaste operativsystemet inom robotik.Hjälpenheterna måste tala samma språk. | |
| Containers ger utvecklaren full flexibilitet när det gäller programmeringsspråk och miljö. Utvecklingstiden förkortas när man använder en bekant programvarumiljö. | |
 |
ROS är en vanlig mellanprogramvara som används i utvecklingen.ROS2 ger möjlighet att gå från utveckling till driftsättning. |
| Kraftfulla verktyg som CUDA och Jetpack kan användas fullt ut på den NVIDIA-baserade VPU:n. |