- 3D αναγνώριση αντικειμένων
- Πλατφόρμα ρομποτικής O3R
Αντιληπτική πλατφόρμα O3R
Η αντιληπτική πλατφόρμα με μια ματιά
Η αντιληπτική πλατφόρμα O3R είναι μία πύλη πολλαπλών αισθητήρων και καμερών με μέγεθος και δομή κόστους των καταναλωτικών προϊόντων - με τη μακροπρόθεσμη διαθεσιμότητα και στιβαρότητα των βιομηχανικών προϊόντων. Στην κεντρική μονάδα επεξεργασίας μπορούν να συνδεθούν έως έξι κεφαλές κάμερας μέσω σύνδεσης FPD καθώς και πρόσθετοι αισθητήρες, όπως ραντάρ ή ελαφρύς εξοπλισμός ανίχνευσης και σκόπευσης (LIDAR), μέσω διασύνδεσης Gigabit Ethernet. Χάρη στην ευέλικτη θέση και διάταξη της εγκατάστασης μπορούν να σαρωθούν ποικίλες περιοχές και, για παράδειγμα, να αποφευχθούν συγκρούσεις με εμπόδια που προεξέχουν στη διαδρομή μετακίνησης πάνω από το οπτικό πεδίο του σαρωτή ασφαλείας.
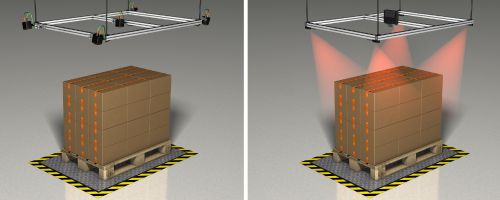
Η ισχυρή κεντρική μονάδα υπολογισμού άκρων προσφέρει αρκετό χώρο για να εκτελείτε τους δικούς σας αλγόριθμους ή να χρησιμοποιείτε έτοιμες λειτουργίες όπως την αποφυγή σύγκρουσης ή την ανίχνευση παλετών.
Θέματα
Ο υψηλότερος βαθμός αυτοματισμού στην αυτοκινητοβιομηχανία
Η βιομηχανία αυτόνομων οχημάτων επιδιώκει την Αυτονομία Επιπέδου 5, δηλαδή, πλήρη αυτοματισμό όπου δεν απαιτείται αλληλεπίδραση με τον οδηγό, η οποία θα επέτρεπε στον γενικό καταναλωτή να αγοράσει ένα αυτόνομο όχημα.
- Οι κατασκευαστές αναγνωρίζουν ότι το Επίπεδο 5 μπορεί να επιτευχθεί μόνο με μία αντιληπτική στοίβα που επιτρέπει στο όχημα να αντιλαμβάνεται καλύτερα το περιβάλλον του.
- Πολυμεθοδική αντιληπτική προσέγγιση γύρω από το όχημα.
- Κάθε μέθοδος έχει σχεδιαστεί για να ξεπερνά την «αδυναμία» μιας άλλης μεθόδου, δημιουργώντας μία ισχυρή πλατφόρμα βέλτιστης περιβαλλοντικής ευαισθητοποίησης στην κατηγορία.
Προκλήσεις στην κινητή ρομποτική
Η αυτονομία δεν είναι κάτι καινούργιο για την κινητή ρομποτική (παρουσιάστηκε για πρώτη φορά τη δεκαετία του 1950).
- Σε αντίθεση με τη βιομηχανία αυτόνομων οχημάτων, τα σημεία κόστους αποτελούν εμπόδιο στην υιοθέτηση των κινητών ρομπότ.
- Τα βασικά σημεία εφαρμογής των κινητών ρομπότ απαιτούν μεγάλη επένδυση από τον χρήστη, αυξάνοντας τον χρόνο για την επίτευξη μιας ισχυρής απόδοσης επένδυσης (ROI).
- Οι κατασκευαστές αναγκάζονται να κάνουν συμβιβασμούς στην επιλογή του hardware, εστιάζοντας κυρίως στην ασφάλεια, προκειμένου να μειωθεί το κόστος των υλικών.
- Σε τελική ανάλυση, ωστόσο, αυτό περιορίζει τη συνολική ευελιξία του ρομπότ κάτι που, με τη σειρά του, μειώνει τις ικανότητές του ρομπότ.
Αν δεν έπρεπε να γίνουν συμβιβασμοί;
Με βάση μια σελίδα από το "βιβλίο" της βιομηχανίας αυτόνομων οχημάτων
Η βιομηχανία αυτόνομων οχημάτων υλοποιεί μία σωστή προσέγγιση για την επίτευξη της Αυτονομίας Επιπέδου 5.Η καλύτερη περιβαλλοντική ευαισθητοποίηση οδηγεί σε μεγαλύτερη ευελιξία και βελτιωμένη συνολική λειτουργία ενός αυτόνομου οχήματος.Η ίδια δυνατότητα θα πρέπει να υπάρχει και για τη βιομηχανία κινητών ρομπότ.
Για να γίνει αυτό πραγματικότητα, πρέπει να μετριαστούν οι προκλήσεις σε εφαρμογές πολλαπλών μεθόδων, πολλαπλών καμερών, συμπεριλαμβανομένου του συγχρονισμού αισθητήρων και της συγχώνευσης.Ο μόνος τρόπος για να μειωθεί το συνολικό κόστος κτήσης για τις αντιληπτικές πλατφόρμες είναι η απλούστευση του σχεδιασμού και της ενσωμάτωσης πολυμεθοδικών συστημάτων.
Η αντιληπτική πλατφόρμα O3R σχεδιάστηκε για να εκπληρώσει αυτό το καθήκον.
Η πλατφόρμα O3R είναι η ολοκληρωμένη λύση για κεντρική, συγχρονισμένη επεξεργασία πληροφοριών από εικόνες και αισθητήρες σε αυτόνομα κινητά ρομπότ, όπως τα αυτοματοποιημένα καθοδηγούμενα οχήματα. Η απλοποιημένη ενσωμάτωση και η αξιόπιστη αλληλεπίδραση των καμερών και των αισθητήρων επιτρέπουν την ευρεία υλοποίηση σχετικών λειτουργιών όπως την αποφυγή σύγκρουσης, την πλοήγηση και τον εντοπισμό θέσης. Επιπλέον, είναι εφικτή η ανάλυση και η διαστασιολόγηση ακίνητων αντικειμένων και ο χειρισμός τους γίνεται πιο αποτελεσματικά μέσω διαφόρων καμερών. Τα παραδείγματα περιλαμβάνουν τη μέτρηση παλετών, κορμών, συσκευασιών ή βαλιτσών.
Κεφαλή κάμερας με σύστημα απεικόνισης που ανέπτυξε η ifm

Η ifm προσφέρει κατάλληλες, υψηλής απόδοσης κεφαλές κάμερας ως μέρος των παρελκομένων της πλατφόρμας: Οι κάμερες 2D/3D έχουν προαιρετικά γωνία διαφράγματος 60° ή 105° και είναι εξοπλισμένες με την πιο προηγμένη συσκευή απεικόνισης με τεχνολογία χρόνου πτήσης τροχιάς από την pmdtechnologies ag. Αυτή η εταιρεία του ομίλου εταιρειών ifm αναπτύσσει όλους τους αισθητήρες για τα οπτικά προϊόντα του ειδικού στον αυτοματισμό και τους προσαρμόζει επακριβώς στις αντίστοιχες απαιτήσεις. Χάρη στο διαμορφωμένο υπέρυθρο φως, η κάμερα 2D/3D εντοπίζει αντικείμενα με μέγιστη αξιοπιστία, ακόμη και με αυξημένη έκθεση στο φως του περιβάλλοντος.
Ισχυρή και ανοικτή: Η κεντρική μονάδα για την επεξεργασία της αισθητηριακής καταγραφής

Ο πυρήνας του συστήματος είναι μια ισχυρή υπολογιστική μονάδα που ονομάζεται μονάδα επεξεργασίας βίντεο (Video Processing Unit, VPU). Βασίζεται στο Yocto Linux και στο NVIDIA Jetson TX2 και υποστηρίζει ανοιχτά περιβάλλοντα ανάπτυξης όπως το ROS και το Docker. Στην υπολογιστική μονάδα μπορούν να συνδεθούν έως και έξι κεφαλές κάμερας. Πρόσθετοι αισθητήρες, όπως αισθητήρες υπερήχων για την ανίχνευση γυάλινων επιφανειών π.χ. πόρτες ή διαχωριστικά τοιχώματα, μπορούν να συνδεθούν μέσω μιας διασύνδεσης Gigabit Ethernet. Επομένως, όλες οι σχετικές "αισθήσεις" που χρειάζεται ένα αυτοματοποιημένο καθοδηγούμενο όχημα για ασφαλή αυτόνομη πλοήγηση είναι διαθέσιμες σε ένα κεντρικό σημείο.
Η αρχιτεκτονική λογισμικού O3R διευκολύνει τόσο την προκαταρκτική ανάπτυξη, όσο και την ανάπτυξη σειράς μέσω μιας πλούσιας επιλογής εργαλείων λογισμικού και υποστήριξης από πολυάριθμες διεπαφές. Χρησιμοποιώντας μια αρχιτεκτονική Docker, υποστηρίζονται ανοιχτά περιβάλλοντα ανάπτυξης όπως Python, ROS, CUDA και C ++.
| Το Linux είναι το συνηθέστερα χρησιμοποιούμενο λειτουργικό σύστημα στη ρομποτική.Οι βοηθητικές συσκευές πρέπει να μιλούν την ίδια γλώσσα. | |
| Οι δομές δεδομένων επιτρέπουν στον προγραμματιστή πλήρη ευελιξία στη γλώσσα προγραμματισμού και το περιβάλλον. Ο χρόνος ανάπτυξης μειώνεται όταν χρησιμοποιείται ένα οικείο περιβάλλον λογισμικού. | |
 |
Το ROS είναι ένα τυπικό ενδιάμεσο λογισμικό που χρησιμοποιείται στην ανάπτυξη.Το ROS2 παρέχει τη δυνατότητα μετάβασης από την ανάπτυξη στη χρήση. |
| Ισχυρά εργαλεία όπως το CUDA και το Jetpack μπορούν να χρησιμοποιηθούν σε πλήρες εύρος σε ένα VPU που βασίζεται σε NVIDIA. |