- 3D-smart-sensor O3M
- Applikationer
- Kollisionsforudsigelse
3D-smart-sensor O3M – forhindringsdetektering og kollisionsforudsigelse
Forhindringsdetektering og kollisionsforudsigelse
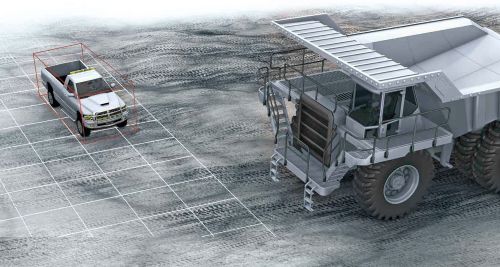
Den integrerede automatiske objektdetektering detekterer op til 20 faste eller bevægelige objekter på kørestrækningen for et køretøj på en byggeplads. Ved hjælp af den aktuelle hastighed, bevægelsesvektoren og faste parametre, for eksempel for bremselængden, beregnes kollisionssandsynligheden af 3D-sensoren, og den overgives til maskinstyringen via CAN-bus eller ethernet og signaliseres til føreren.
Forhindringsdetektering.
3D-smart-sensoren detekterer objekters position og bevægelse i sit billedfelt. Disse data udlæses derefter til styringen.
Kørestrækningsovervågning.
Ved hjælp af et frit indstilleligt referencepunkt på køretøjet registreres forhindringer kun som sådanne, hvis de for eksempel har en forud defineret højde over jorden.
Førerhjælp på en containerstabelkran.
Den automatiske kollisionsforudsigelse støtter kranføreren i forbindelse med positionsskift og informerer om forhindringer på kørestrækningen.