- Датчики нахилу
- Технологія
Технологія датчиків нахилу
«Електронний рівень»
Більшість представлених сьогодні на ринку датчиків нахилу (також відомих як інклінометри, датчики нахилу або схилу) оснащені багатоосьовим MEMS-акселерометром (MEMS = мікроелектромеханічна система).
Ці вимірювальні комірки дуже малі, точні й надійні, а також не зношуються та не вимагають технічного обслуговування.
Простіше кажучи, вимірювальна комірка MEMS складається з двох основних компонентів: рухомої електронної частини й нерухомої механічної частини.
Рухома внутрішня частина, що складається з інерційної маси (сейсмічної маси), має електроди на зовнішньому краю, підвішені на пружинних елементах.
На нерухомій зовнішній частині вимірювальної комірки також розташовані ці електроди.
Електроди, які розташовані на мінімальній відстані один від одного, утворюють «гребінець».
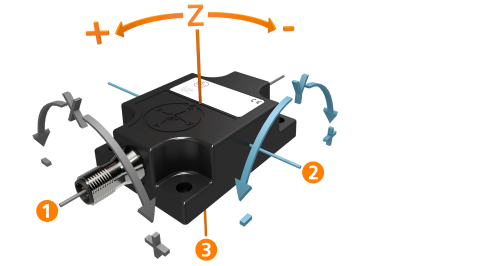
Коли датчик перебуває в горизонтальному положенні, вісь Z датчика зазвичай паралельна вектору Землі. Отже, його значення дорівнює «абсолютному» нулю.
Якщо датчик нахилити в одному напрямку, рухома маса всередині нього та його електрод змінять своє положення щодо нерухомого електрода.

Детальний вигляд MEMS-комірки
- Рух (= прискорення)
- Електроди «гребінця» розташовані на відстані приблизно 1,3 мкм один від одного
Результуюча зміна ємності між цими двома електродами реєструється вимірювальною коміркою та використовується для розрахунку остаточного значення кута.
ВАЖЛИВО!
Кожен датчик нахилу постачається із заводським абсолютним калібруванням.
Як точка відліку використовується вектор гравітації, тобто прискорення вільного падіння 1g (= 9,81 м/с²).
Якщо вісь вимірювання датчика паралельна або збігається з вектором Землі, вимірювання кута неможливе; у цьому положенні датчик не має правильної орієнтації. У результаті пряме вимірювання кута (виявлення обертання) навколо вертикальної опорної осі (кута рискання) стає неможливим. Однак кут рискання можна розрахувати опосередковано за допомогою зовнішнього ПЛК.
Див. «Додаткові функції динамічного датчика нахилу [JDxxxx]».
Визначення кутів
Визначення кута з нульовим положенням осі Z = вектор гравітації
- «крен» по осі Y (поздовжній) ⇒ кут X
- «тангаж» по осі X (бічний) ⇒ кут Y
- «рискання» по осі Z (вертикальне) ⇒ кут Z