- 3D objektdetektering
- O3R Robot Platform
O3R Perception Platform
Et overblik over perception platformen
O3R perception platform er en multisensor- og kamera-gateway i samme prisområde som forbrugerprodukter med den langsigtede tilgængelighed og robusthed, der kendetegner industriprodukter. Op til seks kamerahoveder kan tilsluttes til den centrale procesenhed via FPD link, og yderligere sensorer som f.eks. radar eller lidar kan tilsluttes via Gigabit Ethernet interface. På grund af den fleksible monteringsposition og -opstilling kan forskellige områder scannes så f.eks. kollisioner med forhindringer, der stikker ud i synsfeltet over sikkerhedsscanneren, kan forhindres.
Den kraftige edgecomputing-enhed har plads nok til at køre dine egne algoritmer, eller til at bruge færdige funktioner som f.eks. kollisionsforebyggelse eller palledetektering.
Emner
Højeste grad af automatisering i bilindustrien
Industrien for autonome køretøjer (AV) stræber efter autonomi på niveau 5, fuld automatisering, hvor der ikke kræves nogen interaktion fra føreren, hvilket ville gøre det muligt for en almindelig forbruger at købe en AV.
- Producenterne erkender, at niveau 5 kun kan opnås med en ”perception stack”, der gør det muligt for køretøjet at opfatte omgivelserne bedre.
- Multimodal tilgang til opfattelse af køretøjets omgivelser.
- Hver modalitet er designet til at overvinde en anden modalitets "svaghed", hvilket skaber en robust platform for den bedste miljøbevidsthed i sin klasse.
Udfordringer inden for mobil robotteknologi
Autonomi er ikke noget nyt for mobil robotteknologi (først introduceret i 1950'erne).
- I modsætning til AV-industrien er omkostningerne en hindring for indførelsen af mobile robotter.
- Adgang til mobile robotter kræver en stor investering fra brugerens side, hvilket forlænger den tid, der går, før der opnås en stærk ROI.
- Producenterne er tvunget til at gå på kompromis med valget af hardware og fokuserer primært på sikkerhed for at reducere materialeomkostningerne.
- I sidste ende begrænser dette robottens samlede fleksibilitet, hvilket igen reducerer dens kapacitet.
Hvad nu, hvis du ikke behøvede at gå på kompromis?
Se det fra en AV's side
AV industrien tager ikke fejl i sin tilgang til at nå niveau 5 Autonomi.Bedre miljøbevidsthed fører til større fleksibilitet og en bedre samlet drift af en AV.Den samme mulighed bør være til stede for industrien for mobile robotter.
For at dette kan blive en realitet, skal udfordringerne i multimodale anvendelser med flere kameraer, herunder fusion og synkronisering af sensorer, afhjælpes.Den eneste måde at reducere ejerens samlede omkostninger for opfattelsesplatforme på, er ved at forenkle design og integration af multimodale systemer.
O3R perception platformen blev designet til at løse denne opgave.
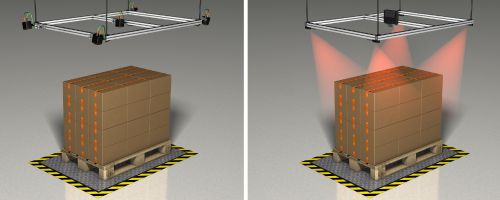
O3R platformen er den omfattende løsning til centraliseret, synkroniseret behandling af billed- og sensorinformation i autonome mobile robotter som f.eks. AGV'er. Den forenklede integration og pålidelige interaktion af kameraer og sensorer, muliggør en robust implementering af relevante funktioner som f.eks. kollisionsforebyggelse, navigation og positionering. Desuden kan der gennemføres analyse og dimensionering af stationære objekter, som håndteres mere effektivt ved hjælp af flere kameraer. Det kan f.eks. være måling af paller, træstammer, pakker eller kufferter.
Kamerahoved med internt udviklet billedsensor

ifm tilbyder passende, højtydende kamerahoveder som en del af platformløsningen: 2D/3D-kameraerne har efter eget valg en åbningsvinkel på 60° eller 105° grader og er udstyret med det nyeste time-of-flight billedkamera fra pmdtechnologies ag. Denne virksomhed i ifm koncernen udvikler alle sensorer til vision produkterne fra automatiseringsspecialisten og tilpasser dem præcist til de respektive krav. Takket være det modulerede infrarøde lys registrerer 2D/3D kameraet objekter med maksimal pålidelighed, selv ved øget eksponering for det omgivende lys.
Kraftfuld og åben: Den centrale enhed for sensorisk behandling

Kernen i systemet er en kraftig computerenhed kaldet Video Processing Unit (VPU). Den er baseret på Yocto Linux og NVIDIA Jetson TX2 og understøtter åbne udviklingsmiljøer som ROS og Docker. Der kan tilsluttes op til seks kamerahoveder til computerenheden. Yderligere sensorer, f.eks. ultralydssensorer til registrering af glasoverflader som døre eller skillevægge, kan tilsluttes via et Gigabit Ethernet interface. Alle relevante "sanser", som en AGV har brug for til sikker autonom navigation, er således tilgængelige på et centralt sted.
O3R softwarearkitekturen letter både indledende udvikling og serieudvikling gennem et omfattende udvalg af softwareværktøjer og understøttelse af mange grænseflader. Ved at bruge en Docker arkitektur, understøttes åbne udviklingsmiljøer som Python, ROS, CUDA og C++.
| Linux er det mest almindeligt anvendte operativsystem inden for robotteknologi.Hjælpeudstyr skal tale det samme sprog. | |
| Containers giver udvikleren fuld fleksibilitet med hensyn til programmeringssprog og miljø. Udviklingstiden reduceres når der benyttes velkendte software udviklingsmiljøer. | |
 |
ROS er en almindelig middleware, der anvendes i udviklingen.ROS2 giver mulighed for at gå fra udvikling til implementering. |
| Kraftfulde værktøjer som CUDA og Jetpack kan fuldt ud implementeres på den NVIDIA baserede VPU. |