- Sensori di inclinazione
- Tecnologia
Sensori di inclinazione Tecnologia
La "livella elettronica"
La maggior parte dei sensori di inclinazione (detti anche inclinometri, sensori di inclinazione o di pendenza) disponibili oggi sul mercato è dotata di accelerometro MEMS multiasse (MEMS = Micro Electro-Mechanical Systems).
Questo tipo di celle di misura è molto piccolo, molto preciso, estremamente robusto e al tempo stesso non è soggetto a usura e non richiede manutenzione.
In parole povere, ogni cella di misura MEMS è formata da due componenti principali:una parte elettronica mobile e una meccanica fissa.
La parte interna mobile, formata da una massa di prova (massa sismica), è dotata di elettrodi sul bordo esterno, sospesi da elementi a molla.
La componente esterna fissa della cella di misura è anch’essa dotata di questi elettrodi.
Gli elettrodi situati a distanza minima l'uno dall'altro formano un "pettine".
Se il sensore è in posizione orizzontale, il suo asse Z di norma è parallelo al vettore di terra. Quindi il suo valore è zero assoluto.
Se il sensore viene inclinato in una direzione, cambia la posizione della massa mobile all’interno e, quindi, anche la posizione del suo elettrodo rispetto all’elettrodo fisso.

Dettaglio di una cella MEMS
- Movimento (= accelerazione)
- Elettrodi a pettine con ~1,3 µm di distanza tra di loro
La variazione della capacità che risulta tra questi due elettrodi viene rilevata dalla cella di misura e utilizzata per calcolare il valore finale dell'angolo.
IMPORTANTE!
Ogni sensore di inclinazione riceve, in fabbrica, una calibrazione assoluta.
Il riferimento in merito è il vettore gravitazionale, quindi l’accelerazione di gravità, 1g (= 9,81 m/s²).
Se un asse di misura del sensore è parallelo al vettore terra o coincide con lo stesso, non è possibile misurare l’angolo; in questa posizione il sensore non ha orientamento. Pertanto, non è possibile misurare direttamente l’angolo (rilevamento della rotazione) intorno all’asse di riferimento verticale (angolo di imbardata).L’angolo di imbardata però può essere calcolato indirettamente tramite un PLC.
Vedere "Funzioni supplementari del sensore di inclinazione dinamico [JDxxxx]".
Definizioni degli angoli
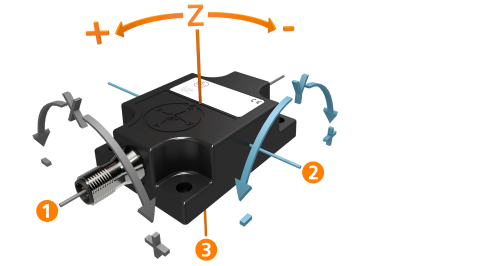
Definizione dell'angolo con posizione zero asse z = vettore gravitazionale
- Asse y "roll" (longitudinale) ⇒ angolo x
- Asse x "pitch" (laterale)⇒ angolo y
- Asse z "yaw" (verticale)⇒ angolo z