- Autonomous mobile robots
- O3R perception platform
Perception technology: Mobile robots in dynamic environments
Identifying objects in space is not a straightforward task for mobile robots. They require multiple perception technologies to operate safely in dynamic, unpredictable environments.
Developers require a robust and comprehensive solution that provides certainty and safety in unstructured environments. ifm’s O3R perception platform improves certainty in dynamic environments by using indirect Time of Flight (ToF) technology inside 2D and 3D cameras and the NVIDIA Jetson platform inside the vision processing unit.
The result is improved throughput and reduced hardware costs. Autonomous mobile robots and automated guided vehicles significantly reduce downtime by making more informed decisions and requiring fewer human interventions. Productivity and profits increase when robots complete more missions per day.
Multimodal: The future of perception stack
Mobile robotics is not limited to 3D cameras. Most robots incorporate 2D cameras, LiDAR, 3D LiDAR, ultrasonics, and other sensors in a standard perception stack. The O3R perception platform simplifies multimodal fusion, tackling complex perception challenges and paving the way for advanced programming.
Ease of integration
The O3R perception platform reduces complexity. It synchronizes diverse data sets and modalities, ensuring robots operate with seamless precision.
Indirect Time of Flight: A leap forward in sensing
Indirect Time of Flight (ToF) revolutionizes how mobile robots perceive depth. By using this unique waveform technology, ifm offers a cost-effective alternative to traditional LiDAR, resulting in detailed 3D imaging for precise obstacle detection.
The ifm ToF system is designed for close-range (0–4 m) accuracy, providing the detailed imaging necessary for mobile robots to navigate complex environments effectively.
Edge computing for enhanced perception
Robots make real-time decisions more effectively, and primary vehicle processors stay clear, because ifm offloads perception to a dedicated edge compute solution.
ifm’s processing platform leverages the industry-standard NVIDIA Jetson ecosystem, providing the combined power of both GPU and CPU. Developers create and implement their designs more easily because the O3R prioritizes simplicity and flexibility in software integration.
Combine Pallet Detection and Obstacle Detection algorithms
Mobile robots use 3D imaging to significantly improve detection of object in their drive path. The same technology enables them to engage with targets, including pallets. However, integrating separate obstacle detection and pallet detection solutions onto a single robot is challenging.
The O3R perception platform simplifyies deploying the ifm obstacle detection and pallet detection algorithms. The benefits include:
- Simplified coordination of both solutions on a single platform.
- Streamlined hardware components.
- Reduced integration and development time.
Accelerate the deployment of mobile robots by reducing hardware costs and software integration time. If you are exploring automated solutions for AGVs, then consider combining both the ifm obstacle detection and pallet detection algorithms. These solutions are easily deployed together on the O3R robotic perception platform.
Contact us today to discuss your application with a robotics specialist.

O3R 2D / 3D head specifications
- 3D image sensor: pmd 3D ToF chip
- 3D resolution: 224 x 172 pixels
- 3D field of view: 105 x 78 º or 60 x 45 º
- 3D light source: 940 nm infrared
- 2D image sensor: RGB
- 2D resolution: 1280 x 800 pixels

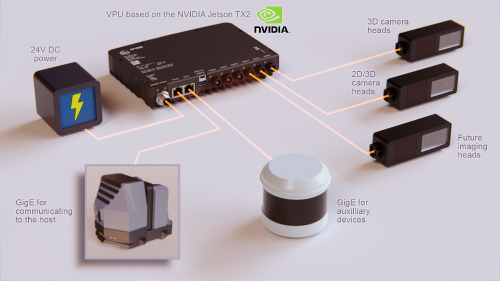
OVP vision processing unit specifications
- Ethernet ports: 2x 1 GigE
- Camera ports: 6x proprietary 2D/3D camera ports
- Power: 24 VDC and CAN
- USB ports: USB 3.0 + USB 2.0
Gain a competitive edge
Are you ready to take your mobile robot development to the next level? Fill out the form or contact Tim McCarver directly at tim.mccarver@ifm.com.