- 기울기 센서
- 기술
기울기 센서 테크놀러지
“전자식 기포 수준기”
현재 시장에 출시된 대부분의 기울기 센서 (경사계, 틸트 또는 각도 센서라고도 함)에는 다축 MEMS 가속도계 (MEMS = microelectromechanical system: 미세전자기계 시스템)가 있습니다.
이러한 타입의 측정 셀은 매우 작고 정밀하며 견고할 뿐만 아니라 마모되지 않고 유지보수가 필요 없습니다.
간단히 말해서, 모든 MEMS 측정 셀은 두 가지 주요 구성 요소로 구성됩니다: 움직이는 전자 부품과 고정된 기계 부품입니다.
움직이는 내부 부품은 검열 질량, proof mass (seismic mass)으로 구성되어 있으며, 스프링 요소에 달려있는 전극과 함께 외부 가장자리에 장착됩니다.
측정 셀의 고정된 외부 부품에는 이러한 전극도 있습니다.
전극은 상호 최소거리로 일종의 “빗 (comb)”을 형성합니다.
센서가 수평 위치에 있는 경우, 센서의 Z축은 일반적으로 접지 벡터와 평행을 이룹니다. 따라서 그들의 값은 "절대" 제로입니다.
센서가 한 방향으로 기울어지는 경우, 내부의 움직이는 질량 포지션이 변경되므로 고정된 전극에 대한 전극의 포지션 또한 상대적으로 변경합니다.

MEMS 셀의 상세 뷰
- 움직임 (= 가속도)
- 상호 ~1.3 µm의 거리를 가진 빗 전극
이 두 전극 간의 정전용량의 결과적인 변화는 측정 셀에 의해 감지되어 최종 각도 값을 계산하는 데 사용됩니다.
중요!
각 기울기 센서는 적대적인 캘리브레이션을 가진 공장설정상태로 제공됩니다.
사용된 참조는 중력 벡터, 즉 중력 가속도 1g (=9.81m/s²) 입니다.
센서의 측정 축이 접지 벡터와 평행하거나 일치하는 경우, 각도 측정은 수행되지 않습니다. 센서는 이 포지션에서 방향을 잃게 됩니다. 그 결과, 수직 기준 축 (요 각도)을 중심으로 한 직접 각도 측정 (회전 감지)은 불가능합니다. 그러나 요 각도는 외부 PLC를 통해 간접적으로 계산할 수 있습니다.
“동적 기울기 센서의 추가 기능 [Jdxxxx]””을 참고하십시오.
각도 정의
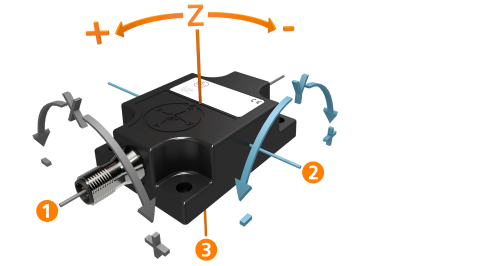
제로 포지션 z축 각도 정의 = 중력 벡터
- y 축 “롤” (세로) ⇒ 각도 x
- x 축 “피치” (가로) ⇒ 각도 y
- z 축 “요 (yaw)” (세로)⇒ 각도 z