- Sensor kemiringan
- Teknologi
Teknologi sensor kemiringan
“Waterpass elektronik”
Sebagian besar sensor kemiringan (juga disebut inklinometer, atau sensor kemiringan) yang tersedia di pasaran saat ini dilengkapi dengan akselerometer MEMS multi-sumbu (MEMS = sistem mikroelektromekanis).
Sel pengukur tipe ini berukuran sangat kecil, presisi, dan kokoh, serta tahan dari keausan dan tidak memerlukan pemeliharaan.
Singkatnya, sel pengukur MEMS terdiri dari dua komponen utama: satu komponen elektronik yang dapat digerakkan dan satu komponen mekanis yang tetap.
Komponen bagian dalam yang dapat bergerak, yang terdiri dari massa pengukur (massa seismik), dilengkapi dengan elektroda di ujung luarnya, digantung dengan elemen pegas.
Komponen bagian luar sel pengukur yang tidak bergerak juga memiliki elektroda ini.
Elektroda yang terletak pada jarak terdekat satu sama lain membentuk struktur “sisir”.
Ketika sensor di posisi horizontal, sumbu z sensor biasanya sejajar dengan vektor bumi. Jadi, nilainya adalah nol “absolut”.
Jika sensor dimiringkan ke satu arah, massa yang dapat bergerak di dalamnya dan elektrodanya akan berubah posisi terhadap elektroda tetap.

Tampilan mendetail sel MEMS
- Gerakan (= akselerasi)
- Elektroda sisir dengan jarak antar elektroda sekitar 1,3 µm
Perubahan kapasitansi yang dihasilkan di antara kedua elektroda ini dideteksi oleh sel pengukur dan digunakan untuk menghitung nilai sudut akhir.
PENTING!
Tiap sensor kemiringan sudah dilengkapi dari pabrik dengan kalibrasi absolut.
Referensi yang digunakan adalah vektor gravitasi, yaitu akselerasi gravitasi, 1g (= 9,81 m/dtk²).
Jika sumbu pengukuran sensor sejajar atau kongruen dengan vektor bumi, maka pengukuran sudut tidak dapat dilakukan; sensor tidak memiliki orientasi pada posisi ini. Oleh karena itu, pengukuran sudut secara langsung (deteksi rotasi) di sekitar sumbu referensi vertikal (sudut yaw) tidak dapat dilakukan. Namun, sudut yaw dapat dihitung secara tidak langsung melalui PLC eksternal.
Lihat “Fitur tambahan dari sensor kemiringan dinamis [JDxxxx]”.
Definisi sudut
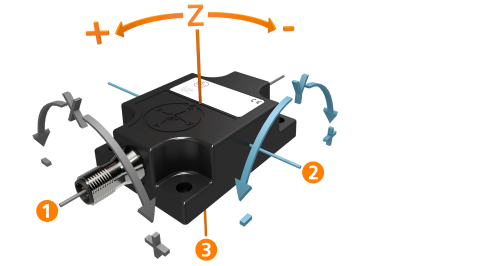
Definisi sudut dengan posisi nol sumbu z = vektor gravitasi
- “roll” sumbu y (longitudinal) ⇒ sudut x
- “pitch” sumbu x (lateral) ⇒ sudut y
- “yaw” sumbu z (vertikal)⇒ sudut z