- 3D-tárgyfelismerő
- O3R robotikai platform
O3R: Többkamerás érzékelőrendszer mobil robotikához
A robotikai platform áttekintése
Az O3R robotikai platform egy olyan többkamerás és többérzékelős rendszer, amely méretét és költségszerkezetét tekintve vetekszik a fogyasztói termékekkel. Ugyanakkor hosszú távú rendelkezésre állásával, nagyfokú stabilitásával és megbízható teljesítményével egy kiforrott ipari termék minden előnye megvan benne.
Az FPD-linken keresztül akár hat kamerafej is csatlakoztatható a központi egységhez (Video Processing Unit, VPU). A Gigabit Ethernet interfészen keresztül további érzékelők, valamint radar vagy lidar is csatlakoztatható a rendszerhez. A kamerafejek rugalmasan beszerelhetők és elrendezhetők, így a teljes környezet hiánytalanul letapogatható, ezáltal pedig elkerülhetők az ütközések például olyan akadályokkal, amelyek a biztonsági szkenner látómezeje fölött nyúlnak be a haladási útvonalba.
A nagy teljesítményű Edge Compute Unit elegendő tárhelyet és számítási erőforrást biztosít az egyéni algoritmusok futtatásához vagy az előre kialakított funkciók, például az ütközéselkerülés vagy a raklapfelismerés használatához.
Témakörök
A legmagasabb szintű automatizálás az autóiparban
Az autóipar az 5. szintre törekszik. Ezen teljes automatizálás esetén már nincs szükség a járművezető beavatkozására, így az ilyen önvezető járművek használata még a nem szakértő végfelhasználók számára is kockázatmentes.
A gyártók tisztában vannak azzal, hogy az 5-ös szintet csak olyan érzékelési csomaggal lehet elérni, amely lehetővé teszi a jármű számára a környezete teljes mértékű rögzítését.
- Számos kamera- és érzékelőjel egyesítése a jármű környezetének megbízható bebiztosítása érdekében. Az egyes érzékelési elveket úgy tervezték, hogy azok kompenzálják egy másik elv „gyengeségeit”, így összességében tartós megoldást jelentenek a környezet lehető leghatékonyabban történő érzékelésére.
Bevált technológia, új környezethez igazítva
Az autonómiát már több mint 70 éve használják a mobil robotikában. Az eljárás tehát nem új, de mindeddig kihívásokkal járt:
- Az autóiparral ellentétben a mobil robotok esetében a költségtényezők jelentik az eljárás bevezetésének akadályát.
- A mobil robotok esetében a belépési pontok nagy beruházást igényelnek a felhasználó részéről, ami késlelteti a magas megtérülés elérését.
- A gyártók kénytelenek kompromisszumot kötni a hardver tekintetében, és elsősorban a biztonságra összpontosítani a gyártási költségek csökkentése érdekében. Ez végeredményben korlátozza a robot általános rugalmasságát, ami viszont csökkenti annak teljesítményét.
Mi lenne akkor, ha Önnek nem kellene kompromisszumot kötnie?
Automatizálja a mobil robotikát az új O3R platformmal
Az autóipar által az 5. automatizálási szint elérése érdekében alkalmazott megközelítés helyes és fontos, hiszen a környezet jobb érzékelése nagyobb rugalmasságot és hatékonyabb, biztonságosabb általános működést eredményez az önvezető járművek esetében.
Ugyanezeknek a lehetőségeknek és előnyöknek kell rendelkezésre állniuk a mobil robotika iparág számára is.
Ahhoz, hogy a mobil robotikában is magas szintű automatizáltságot lehessen elérni, le kell küzdeni a több kamerát alkalmazó, kifinomult alkalmazások esetében felmerülő kihívásokat, beleértve az érzékelők szinkronizálását és összevonását. Az érzékelési platformok teljes üzemeltetési költségeit egyetlen módon – a komplex érzékelő-kamera rendszerek kialakításának és integrációjának egyszerűsítésével – lehet csökkenteni.
Az O3R robotplatformot azért fejlesztették ki, hogy teljesítse ezt a feladatot.
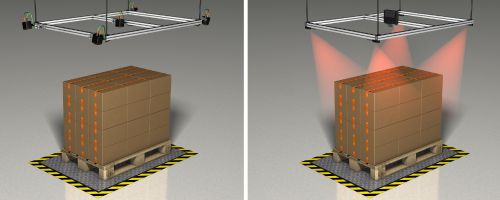
Az O3R platform átfogó megoldást jelent a kép- és érzékelőinformációk központosított, szinkronizált feldolgozására, autonóm mobil robotok, például AGV-k (automatikusan vezérelt járművek) esetében. A kamerák és érzékelők egyszerűsített integrációja és megbízható szinergiája lehetővé teszi az olyan releváns funkciók megbízható végrehajtását, mint az ütközések elkerülése, a navigáció és a pozicionálás. Továbbá az álló objektumok elemzése és méretezése is megvalósítható, és a több kamera használatának köszönhetően hatékonyabbá válik. Ilyen például a raklapok, a farönkök, a csomagok vagy a bőröndök mérése.
Kamerafej saját fejlesztésű képalkotóval

Az ifm megfelelő, nagy teljesítményű kamerafejeket kínál a platformmegoldás részeként: A 2D/3D kamerák opcionálisan 60°-os vagy 105°-os blendemérettel rendelkeznek, és a pmdtechnologies ag legújabb Time-of-Flight-Imager-ével vannak felszerelve. Az ifm cégcsoporthoz tartozó vállalat az automatizálási szakemberek tárgyfelismerő termékeiben használt érzékelőket fejleszt, és pontosan az adott követelményekhez igazítja azokat. A modulált infravörös fénynek köszönhetően a 2D/3D kamera rendkívüli megbízhatósággal észleli a tárgyakat még erős környezeti fényviszonyok között is.
Nagy teljesítményű és nyitott: a szenzorikus feldolgozás központi egysége

A rendszer központi eleme a nagy teljesítményű számítóegység, a Video Processing Unit (VPU). A VPU Yocto Linux és NVIDIA Jetson TX2 alapú, és támogatja az olyan nyílt fejlesztői környezeteket, mint az ROS és a Docker. A VPU akár hat kamerafejhez is csatlakoztatható, és további érzékelők – például az olyan üvegfelületek, mint az ajtók vagy a válaszfalak érzékelésére szolgáló ultrahangos érzékelők – is csatlakoztathatók hozzá Gigabit Ethernet interfészen keresztül. Az összes releváns „érzékszerv”, amelyre az AGV-nek szüksége van a biztonságos autonóm navigációhoz, rögzítése és feldolgozása egyetlen központi helyen történik.
Az O3R szoftverarchitektúra szoftvereszközök széles választékával és számos interfész támogatásával az előzetes fejlesztést és a sorozatfejlesztést egyaránt megkönnyíti. A Docker architektúra használatával olyan nyílt fejlesztői környezeteket is támogat, mint a Python, a ROS, a CUDA és a C++.
| A Linux a robotikában leggyakrabban használt operációs rendszer. A segédeszközöknek ugyanazt a nyelvet kell beszélniük. | |
| A Docker Containerek teljes rugalmasságot biztosítanak a fejlesztő számára a programozási nyelv és a programozói környezet tekintetében. A megszokott szoftverkörnyezet használatának köszönhetően rövidebb lesz a fejlesztéshez szükséges idő. | |
 |
Az ROS a fejlesztés során gyakran használt köztes szoftver. Az ROS2 minden lehetőséget biztosít a fejlesztés során, és gondoskodik a maximális stabilitásról a valós körülmények között történő használat közben. |
| Az NVIDIA-alapú VPU-n teljes mértékben használhatók az olyan nagyteljesítményű eszközök, mint a CUDA és a Jetpack. |