- Sensores de inclinação
- Tecnologia
Tecnologia dos sensores de inclinação
O "nível eletrônico"
A maior parte dos sensores de inclinação atualmente disponíveis no mercado (também chamados de transdutores de inclinação, encoders de inclinação ou sensores angulares) estão equipados com uma célula de medição de aceleração MEMS de múltiplos eixos (MEMS = micro-electro-mechanical-system).
Este tipo de célula de medição é muito pequeno, preciso, extremamente robusto e também livre de desgaste e manutenção.
Explicando de forma simplificada, cada célula de medição MEMS é composta de duas partes principais:uma parte eletrônica móvel e uma parte mecânica fixa.
A parte interna móvel é composta de uma massa de teste (massa sísmica) e dotada de eletrodos suspensos por elementos de mola na borda externa.
A parte externa fixa da célula de medição também está dotada destes eletrodos.
Estes eletrodos formam uma espécie de pente com distância mínima entre si.
Se o sensor está em posição horizontal, então normalmente o eixo Z do sensor está paralelo ao vetor terrestre. Sendo assim, o seu valor é zero absoluto.
Quando o sensor é inclinado em uma direção, a posição da massa móvel em seu interior muda, portanto também a posição do seu eletrodo em relação ao eletrodo fixo.

Vista detalhada da célula MEMS
- Movimento (= Aceleração)
- Pentes de eletrodos com distância de ~1,3 µm entre si
A alteração de capacitância resultante entre estes dois eletrodos é captada pela célula de medição e é a base dos cálculos subsequentes de um valor final do ângulo.
IMPORTANTE!
Cada sensor de inclinação vem com calibração absoluta de fábrica.
A referência para isso é o vetor gravitacional, ou seja, a aceleração terrestre de 1g (= 9,81 m/s²).
Se o eixo de medição do sensor está paralelo ou sobre o vetor terrestre, não será possível fazer a medição angular, nesta posição o sensor não tem orientação. Desta forma, não é possível a medição angular direta (detecção de rotação) em torno do eixo de referência vertical (ângulo azimutal).Entretanto, este ângulo azimutal pode ser calculado indireta e externamente, através de um CLP.
Consulte "Funções adicionais do sensor de inclinação dinâmico [JDxxxx]".
Definições do ângulo
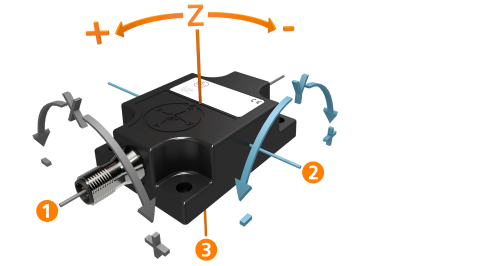
Definição do ângulo na posição zero do eixo Z = vetor de gravitação
- Eixo Y "Rolagem" (longitudinal) ⇒ Ângulo X
- Eixo X "Arfagem" (lateral)⇒ Ângulo Y
- Eixo Z "Guinada" (vertical)⇒ Ângulo Z