- Visionsensoren
- Visionsensor type O2D
- Technologie
Technologie visionsensor O2D
O2D in detail
Contourherkenning
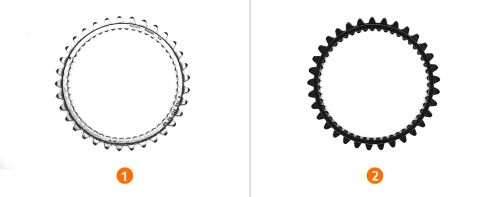
De contourherkenning is een belangrijk instrument voor de 2D-beeldverwerking. Daarbij worden randen en overgangen van voorgrond naar achtergrond vastgelegd en op basis van de informatie een contour berekend. De bijzonderheid van de contourherkenning is dat deze ook op betrouwbare wijze werkt bij beïnvloeding door extern licht, omdat het externe licht gewoonlijk op het gehele object valt. Het relatieve verschil tussen voorgrond en achtergrond verschuift, maar de contour wordt toch op betrouwbare wijze herkend. De objectinspectie wordt dan uitgevoerd doordat een referentiecontour wordt vergeleken met het feitelijke object.
De contourherkenning gebeurt door:
- Extractie van het te onderscheiden object ten opzichte van de achtergrond door het aanpassen van de belichtingssituatie
- Optimalisatie van het contour door het verwijderen van niet-noodzakelijke gedeelten
- De algoritme herkent in het livebeeld mogelijke contouren, die aan de hand van een drempelwaarde (score) worden onderscheiden als goed of slecht deel
Waar wordt de contourherkenning toegepast:
Het proces wordt met name gebruikt in de patroon- en vormherkenning, evenals de objectherkenning, zoals die gewoonlijk gebruikt wordt bij het stansen, frezen, draaien of in de montage. De contourherkenning dient in deze sectoren als kwaliteitsborging.
Blob-analyse
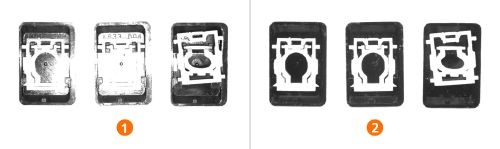
De Blob-analyse is een belangrijke beeldverwerkingsmethode, waarbij de beeldkenmerken worden geselecteerd en geanalyseerd aan de hand van een groep soortgelijke naast elkaar gelegen pixels.
De BLOB (Engels kunstwoord: Binary Large Object) betekent in deze context binary-logic dataobject, wat vrij vertaald een hoeveelheid pixels is met een gelijke logische toestand. De selectie van de naastgelegen pixels gebeurt in het algemeen via de drempelwaardevorming van de grijswaarde. Uit de analyse kunnen dan conclusies worden getrokken over de verschillende kenmerken. Een bekende functie is bijv. de pixelteller.
De Blob-analyse vindt plaats door:
- Extractie van het aandachtsgebied uit de achtergrond door de drempelvorming via de grijswaarde
- Optimalisatie van de zoekcriteria via verschillende attributen
- Berekening van de gezochte kenmerken, zoals bijv. aantal pixels (pixelteller), oppervlaktezwaartepunt, oriëntatie, vorm (bijv. rondheid, rechthoekigheid) en diameter
Waar wordt de Blob-analyse toegepast?
Die wordt op uiteenlopende manieren gebruikt. Zo kan de Blob-analyse bijvoorbeeld worden gebruikt voor de volledigheids-, aanwezigheidscontrole of de schroefdraadherkenning evenals voor het tellen en sorteren van objecten.
Positiebijstelling
De positiebijstelling gebeurt met behulp van een ankercontour dat eenmalig in het beeld wordt gevonden. Aan de hand van deze contour kunnen zoekgebieden van andere modellen (bijvoorbeeld de zoekzone van een Blob-analyse) qua positie maar ook wat oriëntatie betreft worden bijgeregeld.
Grafische weergave van een positiebijstelling aan de hand van een voorbeeld:
Herkenning van soldeerballetjes op een clip

- Op de punt van een clip moet worden gecontroleerd of alle drie soldeerbolletjes aanwezig zijn (groen aangeduid).
Omdat de contour van een soldeerballetje weliswaar varieert, maar het oppervlak van een soldeerballetje echter constant blijft, wordt een Blob-analyse gebruikt.De oranjekleurige zoekgebieden voor de aanwezigheidscontrole worden gedefinieerd via het te controleren gebied. - Om deze zoekgebieden afhankelijk van de positie en de oriëntatie van de clip bij te stellen, wordt een referentiecontour – de zogeheten anker-contour - gedefinieerd (afgebeeld in roze).Dan wordt de contour van de linkse ronding van de clip "verankerd" met de zoekgebieden van de Blob-analyse.
- Wanneer de clip nu bijvoorbeeld 20 graden draait, wordt de anker-contour ook in de gedraaide toestand gevonden. De oranjekleurige zoekgebieden van de Blob-analyse worden dan automatisch in de juiste positie en oriëntatie bijgesteld.
De O2D5-familie van ifm gebruikt een CMOS-beeldprocessor met 1,2 MP (1280 x 960 pixels).
- Elke pixel bevat een foton dat licht van de cameralens opvangt en versterkt.
- Microlenzen op elke pixel maximaliseren het fotoncontact.
- Het foton neemt een elektrische lading op die evenredig is met de hoeveelheid licht die het ontvangt.
- De elektrische lading wordt omgezet in een analoog spanningssignaal.
- Het analoge signaal wordt doorgestuurd naar een A/D-omvormer.
- De beeldprocessor verwerkt elk digitaal signaal en stelt dat samen tot een beeld.
CMOS-beeldprocessoren zijn gemakkelijker, sneller en goedkoper te fabriceren waardoor ze het meest gangbaar zijn in de markt.

De keuze van de juiste belichting voor het maximaal haalbare contrast voor elke pixel is bepalend. De O2D-familie wordt compleet met geïntegreerde, zeer intensieve LED-lichtbronnen in RGB-W (rood, groen, blauw, wit) en infrarood geleverd.
Let op, de beeldsensor is geen kleursensor!
De keuze van een lichtbron met een andere kleur kan echter van grote invloed zijn op het contrast van het beeld. Het beeld onder toont kleurpotloden bij daglicht en dezelfde pennen verlicht met de verschillende LED’s van de O2D5-sensor.
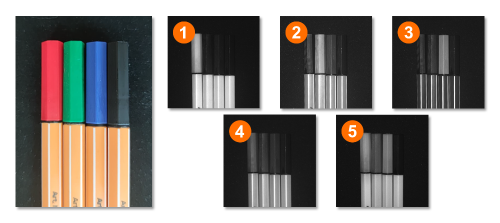
Vergelijking van de lichtbronnen
| Lichttype | Let op: |
|---|---|
| Daglicht (referentie) |
|
| Rood licht |
|
| Groen licht |
|
| Blauw licht |
|
| Wit licht |
|
| Infraroodlicht |
|
Werking van het polarisatiefilter
Vanwege reflecties kan het moeilijk zijn om scherpe contouren of gedeelten op glanzende objecten te realiseren. De O2D5-sensoren met RGB-W-lichtbronnen beschikken over een polarisatiefilter dat in- of uitgeschakeld kan worden om het effect van reflecties te verminderen.
- zonder polarisatiefilter
- met polarisatiefilter