- Detecção de objeto em 3D
- Plataforma robótica O3R
O3R: sistema de sensores de várias câmeras para robôs móveis
Visão geral da plataforma robótica
A plataforma robótica O3R é um sistema de várias câmeras e sensores que devido ao seu tamanho e estrutura de custo é comparável com os produtos de consumo. Ao mesmo tempo, oferece todas as vantagens de um produto industrial consolidado com disponibilidade a longo prazo, alta robustez e desempenho fiável.
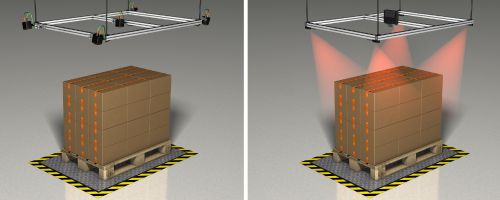
Através do FPD-Link é possível conectar até seis cabeças de câmeras à unidade central, a unidade de processamento de vídeo (VPU).Podem também ser conectados sensores adicionais assim como radar ou lidar via interface Gigabit Ethernet. As cabeças de câmeras podem ser instaladas e dispostas de forma flexível. Desta forma é possível digitalizar a área completa, evitando assim colisões com obstáculos, por exemplo, que se projetam no trajeto acima do campo de visão do scanner de segurança.
A potente unidade central de computação edge oferece memória e recursos suficientes para executar algoritmos personalizados ou usar funções pré-configuradas, assim como evitar colisões ou detectar paletes.
Temas
O mais alto nível de automação da indústria automotiva
A indústria automotiva está se esforçando para chegar ao nível 5. Com esta automação completa, a interação do condutor não é mais necessária, de modo que um veículo autônomo deste tipo não oferece riscos de uso mesmo para usuários inexperientes.
Os fabricantes estão conscientes de que o nível 5 só pode ser alcançado com um pacote de percepção que permita ao veículo captar completamente o seu redor.
- Fusão de vários sinais de câmeras e sensores para proteger de forma confiável o ao redor do veículo. Cada princípio de sensor é projetado de tal forma a compensar as "fraquezas" de outro princípio, sendo assim no conjunto, uma solução robusta para a melhor percepção possível do ambiente.
Tecnologia comprovada e adaptada a um novo ambiente
A autonomia é utilizada na robótica móvel há mais de 70 anos. Portanto, o procedimento não é novo, mas até agora tem sido associado a desafios:
- Ao contrário do setor automotivo, as questões de custo são um obstáculo para a implementação de robôs móveis.
- A implementação de robôs móveis exige um grande investimento inicial por parte do usuário, o que aumenta o tempo até alcançar um alto retorno sobre o investimento.
- Os fabricantes são forçados a fazer concessões na seleção do hardware e a se concentrarem principalmente na segurança para reduzir os custos de fabricação. Isto acaba por limitar a flexibilidade geral do robô, o que, por sua vez, reduz o seu desempenho.
Que tal não ter que fazer concessões?
Automatize a robótica móvel com a nova plataforma O3R
A abordagem da indústria automobilística para atingir o nível 5 de automação é correta e importante. Porque uma melhor percepção do ambiente ao redor leva a uma maior flexibilidade e uma operação geral mais eficiente e segura de um veículo autônomo.
As mesmas oportunidades e benefícios também devem existir para a indústria de robótica móvel.
Para alcançar um alto nível de automação também na robótica móvel, é preciso superar os desafios de aplicações exigentes usando várias câmeras, incluindo a sincronização e fusão de sensores. A única maneira de reduzir o custo total das plataformas de percepção é simplificar a execução e integração de sistemas complexos de sensores e câmeras.
A plataforma robótica O3R foi desenvolvida para cumprir esta tarefa.
A plataforma O3R é a solução abrangente para o processamento centralizado e sincronizado da informação em robôs móveis autônomos como por exemplo FTS (AGVs). A integração simplificada e a interação confiável de câmeras e sensores permitem a implementação robusta de funções relevantes, tais como navegação, posicionamento e evitar colisões. Além disso, a análise e o dimensionamento de objetos estacionários podem ser realizados e se tornam mais eficazes através do uso de várias câmeras. Exemplos são a medição de paletes, troncos de árvores, pacotes ou malas.
Cabeça de câmera com gerador de imagens de desenvolvimento próprio

A ifm oferece câmeras compatíveis e de alto desempenho como parte da solução da plataforma: As câmeras 2D/3D possuem um ângulo de abertura de 60° ou 105° e estão equipadas com o mais recente gerador de imagens baseado em tempo de voo (time of flight) da pmdtechnologies ag. A empresa do grupo empresarial ifm desenvolve sensores que são utilizados nos produtos de visão do especialista em automação e os adapta exatamente à cada exigência. Graças à luz infravermelha modulada, a câmera 2D/3D detecta objetos com uma alta confiabilidade mesmo com uma maior luminosidade ambiente.
Potente e aberta: a unidade central para o processamento sensorial

O elemento central do sistema é a unidade de computação potente, a unidade de processamento de vídeo (VPU). A VPU é baseada em Yocto Linux e NVIDIA Jetson TX2 é compatível com ambientes de desenvolvimento abertos, como ROS e Docker. A VPU possui conexões para até seis cabeças de câmeras e é possível conectar sensores adicionais, tais como sensores ultrassônicos para detectar superfícies de vidro como portas ou divisórias, através de uma interface Gigabit Ethernet. Assim, todos os "sentidos" relevantes que um AGV precisa para uma navegação autônoma segura são registrados e processados em um ponto central.
A arquitetura de software O3R facilita tanto o pré-desenvolvimento quanto o desenvolvimento em série graças à uma ampla seleção de ferramentas de software e a compatibilidade com várias interfaces. Com o uso de uma arquitetura Docker, os ambientes de desenvolvimento de código aberto como Python, C++, CUDA e ROS se tornam compatíveis.
| O Linux é o sistema operacional mais comumente utilizado em robótica. Os dispositivos auxiliares devem falar a mesma língua. | |
| Containers Docker permitem uma total flexibilidade em linguagem de programação e ambiente ao desenvolvedor. O tempo de desenvolvimento diminui com o uso de um ambiente de software familiar. | |
 |
O ROS é um middleware frequentemente utilizado no desenvolvimento. ROS2 oferece todas as possibilidades em desenvolvimento e garante a máxima estabilidade nas aplicações reais. |
| Ferramentas potentes como CUDA e Jetpack podem ser totalmente implementadas na VPU baseada em NVIDIA. |