- 3D形状認識
- パレット検出システム(PDS)
- PDSの統合
PDSの統合
ソリューションの導入を成功させるための鍵は、すべての要件をしっかり理解することです。 それはPDSも同じです。 このセクションでは、PDSの導入を確実に成功させるための必要要件をすべて詳細に説明しています。 次の項目を取り上げています。
- 取付け位置:
カメラを車両のどこにどのように取付けるか。 - 配線:
PDSソリューションの配線方法(電源/通信) - ソフトウェアインターフェース:
PDSを車両のコントローラに接続する方法。 - 検出可能なパレットタイプ:
標準PDSソリューションで検出できるパレットのタイプ。
以下のステップに従うことで、PDSの導入を確実に成功させることができます。
PDSソリューション

取付け位置:
角度:

取付けの高さ

配線
PDSはO3Dカメラに統合されています。 このカメラにはDC24V電源が必要で、イーサネット経由で通信します。 両方のインターフェースの配線を次の図に示します。
コネクタ: M12x1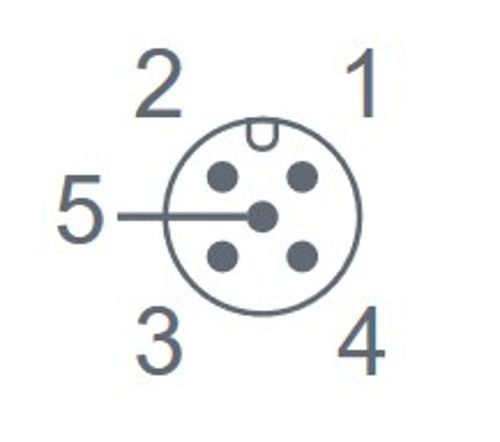 接続方法: プロセス接続口 |
コネクタ: M12x1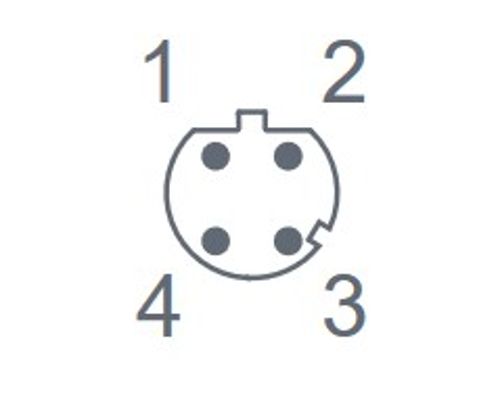 接続方法: Ethernet |
|---|---|
| 1. U+ | 1. TD+ |
| 2. トリガ入力 | 2. RD+ |
| 3. GND | 3. TD- |
| 4. スイッチング出力1_準備完了 | 4. RD- |
| 5. スイッチング出力1_カスケード |
注意: カメラは画像のキャプチャ中に2.4 Aのピーク電流が必要です。
検出可能なパレットタイプ
PDSは2つのパレットポケットを備えたパレットを検出するように設計されています。 「Block」パレットと「Stringer」パレットが区別されます。
PDSは次の2ポケットパレット形状/タイプの検出に使用できます。
 Wood, block |
 Wood, stringer |
 Plywood, stringer |
 Double-sided |
 Reversible |
 2-way |
 GMA 4-way |
 Single-face, stringer |
 CHEP |
 PECO |
 Plastic |
 Nestable, plastic |
 IGPS |