- Rilevamento di oggetti 3D
- Piattaforma O3R per robot
O3R: la piattaforma per telecamere per robot autonomi
La piattaforma per robot in breve
La piattaforma O3R è un sistema multi-camera e multi-sensore che non ha nulla da invidiare ai prodotti di consumo in merito a dimensioni e struttura dei costi. Allo stesso tempo, offre tutti i vantaggi di un prodotto industriale solido con disponibilità a lungo termine, elevata robustezza e prestazioni affidabili.
All'unità centrale, Video Processing Unit (VPU), è possibile collegare fino a sei telecamere tramite FPD-Link. Altri sensori, come radar o LIDAR, possono essere collegati tramite l'interfaccia Gigabit Ethernet. Grazie ad un’installazione delle telecamere con posizione e disposizione flessibili, è possibile scansionare tutto l’ambiente e, ad esempio, evitare collisioni con ostacoli che sporgono nel percorso sopra il campo visivo del safety scanner.
La potente unità di calcolo centrale edge computing fornisce abbastanza memoria e risorse di calcolo per eseguire algoritmi personalizzati o utilizzare funzioni pre-costruite come funzioni anticollisione o il rilevamento dei pallet.
Temi
Il più alto livello di automazione nell'industria automobilistica
L'industria automobilistica punta al livello 5. Con una piena automazione, l'interazione del conducente non è più necessaria, rendendo così il veicolo autonomo e privo di rischi anche se utilizzato da utenti finali non esperti.
I produttori sono consapevoli che il livello 5 può essere raggiunto solo con un sistema di percezione che permette al veicolo di rilevare completamente l'ambiente circostante.
- Fusione di numerosi segnali di telecamere e sensori per proteggere in modo affidabile l’ambiente di azione del veicolo. Ogni modalità del sensore è progettata per compensare le "debolezze" di un’altra modalità, realizzando così una piattaforma robusta per la migliore percezione ambientale possibile.
Tecnologia collaudata, adeguata ad un nuovo ambiente
I robot autonomi vengono utilizzati ormai da più di 70 anni. La procedura non è quindi nuova, ma è stata finora legata a delle sfide.
- A differenza del settore automobilistico, i costi sono un ostacolo per l’introduzione dei robot autonomi.
- I punti di ingresso per i robot autonomi richiedono grandi investimenti da parte dell'utente che deve aspettare più tempo per raggiungere un elevato ritorno sull'investimento.
- I produttori sono costretti a scendere a compromessi nella scelta dell'hardware e a concentrarsi principalmente sulla sicurezza per ridurre i costi di produzione. Questo limita la flessibilità complessiva del robot, riducendone la performance.
E se non dovessi scendere a compromessi?
Automatizzare i robot autonomi con la nuova piattaforma O3R
L'approccio dell'industria automobilistica per raggiungere il livello di automazione 5 è giusto e importante. Una migliore percezione dell'ambiente porta a una maggiore flessibilità e a un funzionamento complessivo più efficiente e sicuro di un veicolo autonomo.
Le stesse opportunità e i vantaggi dovrebbero esistere anche per l'industria dei robot autonomi.
Per raggiungere un elevato livello di automazione anche nei robot autonomi, è necessario superare le sfide delle applicazioni più complesse con più telecamere, compresa la sincronizzazione e la fusione dei sensori. L'unico modo per ridurre i costi operativi totali delle piattaforme di percezione è semplificando la realizzazione e l'integrazione di complessi sistemi di sensori e telecamere.
La piattaforma O3R è stata sviluppata per svolgere questa funzione.
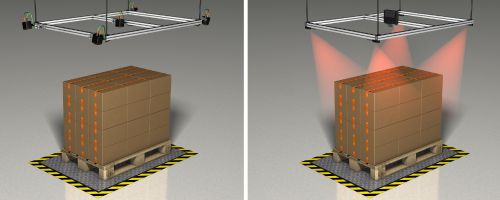
La piattaforma O3R è la soluzione completa per l'elaborazione centralizzata e sincronizzata delle informazioni derivanti dalle immagini e dai sensori in robot autonomi, ad esempio veicoli a guida automatica (AGV). L'integrazione semplificata e l'interazione affidabile di telecamere e sensori consentono di implementare funzioni importanti come la prevenzione di collisioni, la navigazione e il posizionamento. Inoltre, l'analisi e il dimensionamento di oggetti stazionari possono essere realizzati e resi più efficaci utilizzando più telecamere. La misurazione di pallet, tronchi, pacchi o valigie è solo un esempio.
Telecamera con sensore ToF, progettato internamente

ifm offre telecamere adeguate e ad alte prestazioni come componenti della piattaforma. Le telecamere 2D/3D hanno un angolo di apertura di 60° o 105° e sono dotate del nuovissimo sensore ToF di pmdtechnologies ag. L'azienda del Gruppo ifm progetta sensori che vengono utilizzati nei prodotti di visione degli specialisti dell'automazione e li adatta esattamente ai rispettivi requisiti. Grazie alla luce infrarossa modulata, la telecamera 2D/3D rileva gli oggetti con la massima affidabilità anche in presenza di una maggiore luminosità ambientale.
Performante e accessibile: l'unità centrale di elaborazione sensoriale

Il cuore del sistema è la potente unità di calcolo, Video Processing Unit (VPU). La VPU è basata su Yocto Linux e NVIDIA Jetson TX2 e supporta ambienti di sviluppo aperti come ROS e Docker. La VPU è dotata di connettori per un massimo di sei telecamere e, tramite un'interfaccia Gigabit Ethernet, è possibile collegare sensori aggiuntivi, come quelli a ultrasuoni per il rilevamento di superfici in vetro come porte o pareti divisorie. Tutti i "sensi" rilevanti, necessari ad un AGV per una navigazione autonoma e sicura, vengono registrati ed elaborati in un punto centrale.
L'architettura software O3R facilita sia la progettazione che lo sviluppo in serie grazie ad una ricca selezione di strumenti software e al supporto di numerose interfacce. Utilizzando un'architettura Docker, vengono supportati ambienti di sviluppo aperti come Python, ROS, CUDA e C++.
| Linux è il sistema operativo più utilizzato nella robotica. I dispositivi ausiliari devono parlare la stessa lingua. | |
| I contenitori Docker consentono una piena flessibilità nel linguaggio e nell'ambiente di programmazione. I tempi di sviluppo si riducono grazie all'utilizzo di un ambiente software familiare. | |
 |
ROS è un software middleware spesso utilizzato nello sviluppo. ROS2 offre tutte le possibilità di sviluppo e garantisce la massima stabilità nell'uso reale. |
| Strumenti potenti come CUDA e Jetpack sono pienamente operativi sulla VPU basata su NVIDIA. |