視覺感測器 O2D 技術
O2D 詳情
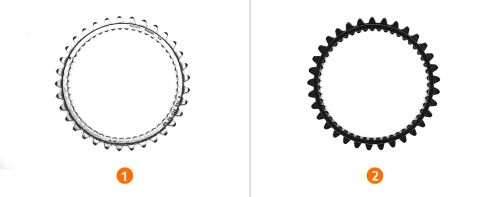
輪廓驗證
輪廓偵測是 2D 影像處理的重要工具。邊緣以及從前景到背景的過渡進行偵測,並根據資訊計算輪廓。輪廓偵測的特殊之處在於,它在受到外界光幹擾的情況下也能可靠地運作,因為外界光通常會照射到整個物體上。前景和背景之間的相對差異發生了變化,但仍能同等確定地偵測輪廓。而後,將參考輪廓與當前物體進行匹配以執行物體檢查。
透過以下方式偵測輪廓:
- 透過調整光照情況從背景中提取要突出顯示的物體
- 透過刪除不必要的區域來優化輪廓
- 演算法偵測即時影像中的可能輪廓,並根據閾值 (分數) 區分為合格或不合格部件
輪廓偵測適用的領域:
此方法主要用於圖案和形狀偵測以及物體識別,通常應用於沖孔、銑削、車削或組裝。輪廓偵測用於這些方面的品質保證。
Blob 分析
Blob 分析是一種重要的影像處理方法,它針對一組相似的相鄰像素選擇並分析影像特性。
在這種情況下,BLOB (新造詞二進大物件) 代表二進位邏輯資料物件,可以粗略地理解為一組具有相同邏輯狀態的像素。相鄰像素的選擇通常透過對灰階值進行閾值處理來完成。而後可以透過分析得出關於各種特性的結論。例如,一個眾所周知的功能是像素計數器。
透過以下方式進行 Blob 分析:
- 透過對灰階值進行閾值處理,從背景中提取感興趣區域
- 透過各種屬性優化搜尋條件
- 計算所搜尋的特性,例如像素數 (像素計數器)、面積重心、方向、形狀 (例如圓度、矩形度) 和直徑
Blob 分析適用於哪些方面?
有許多不同的應用。例如,Blob 分析可用於監控完整性、偵測存在性或螺紋以及對物體進行計數和排序。

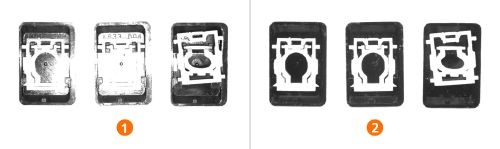
- 在夾片的尖端,必須檢查是否存在所有三個焊球 (以綠色顯示)。
由於焊球的輪廓會發生變化,但焊球的面積保持不變,因此使用 Blob 分析。橙色顯示的搜尋區域針對待檢查區域的存在性監控定義。 - 為了根據夾片的位置和方向追蹤這些搜尋區域,定義參考輪廓 - 即所謂的錨點輪廓 (以粉紅色顯示)。而後,夾片左圓的輪廓與 Blob 分析的搜尋區域「錨定」。
- 例如,如果夾片現在旋轉 20 度,則錨點輪廓也會處於旋轉狀態。然後,Blob 分析的橙色搜尋區域會自動追蹤到正確的位置和方向。
ifm 的 O2D5 系列使用 1.2 MP (1280 x 960 像素) 的 CMOS 影像處理器。
- 每個像素都包含一個光子,收集並放大來自攝像頭鏡頭的光。
- 每個像素上的微透鏡最大限度地提高了光子接觸。
- 光子累積的電荷與其所接收到的光量成比例。
- 電荷轉換成類比電壓信號。
- 類比信號傳送至 A/D 轉換器。
- 影像處理器評估每個數位信號並將其組合成影像。
CMOS 影像處理器的製造更輕鬆快速實惠,是市場上應用最廣泛的影像處理器。

為了最大限度提升每個像素的對比度,務必選擇正確的照明。O2D 系列配備 RGB-W (紅、綠、藍、白) 和紅外線整合高強度 LED 光源。
請注意,影像感測器不是顏色感測器!
但選擇不同顏色的光源會對影像的對比度產生巨大影響。下圖顯示了日光下的蠟筆,為了進行比較,分別由 O2D5 感測器的不同 LED 照射。
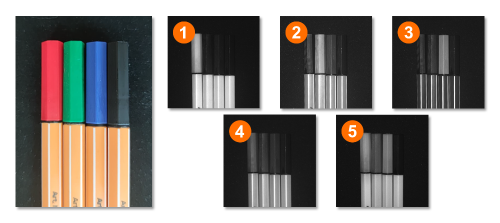
不同光源的對比
| 光類型 | 請注意: |
|---|---|
| 日光 (參考) |
|
| 紅光 |
|
| 綠光 |
|
| 藍光 |
|
| 白光 |
|
| 紅外線 |
|
偏光濾鏡的效果
由於反射,很難獲得閃亮物體上的清晰輪廓或區域。具有 RGB-W 光源的 O2D5 感測器包含一個偏光濾鏡,可開啟或關閉以最大限度地減少反射的影響。
- 無偏光濾鏡
- 有偏光濾鏡