- Sensores de visión
- Sensor de visión tipo O2D
- Tecnología
Tecnología del sensor de visión O2D
El O2D en detalle
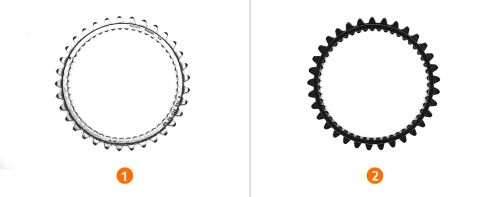
Detección de contornos
La detección de contornos es una herramienta importante para el procesamiento de imágenes 2D. Se detectan los bordes, así como las transiciones del primer plano al fondo, y se calcula un contorno a partir de esta información. La particularidad de la detección de contornos es que también funciona de forma fiable en presencia de luz extraña, ya que esta suele incidir en todo el objeto. La diferencia relativa entre el primer plano y el fondo se desplaza, pero el contorno se sigue reconociendo con la misma certeza. La inspección del objeto se realiza comparando un contorno de referencia con el objeto actual.
La detección de contornos se realiza mediante:
- Extracción del objeto a destacar del fondo mediante el ajuste de la situación lumínica
- Optimización del contorno mediante la eliminación de zonas innecesarias
- El algoritmo detecta posibles contornos en la imagen en tiempo real, que se distinguen como piezas aptas o no aptas en función de un valor umbral (puntuación)
¿En qué aplicaciones se utiliza la detección de contornos?
El método se utiliza principalmente en el reconocimiento de patrones y formas, así como en el reconocimiento de objetos, tal y como se aplica habitualmente en el punzonado, fresado, torneado o en el montaje. La detección de contornos se utiliza para garantizar la calidad en estos procesos.
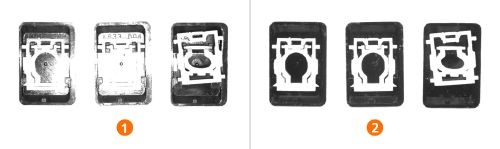
Análisis de manchas
El análisis de "blobs" (manchas) es un importante método de procesamiento de imágenes en el que las características de la imagen se seleccionan y analizan a partir de un grupo de píxeles contiguos similares.
El BLOB (del inglés Binary Large Object) en este contexto significa Binary-Logic Data Object, que se traduce ampliamente como un conjunto de píxeles con el mismo estado lógico. La selección de los píxeles contiguos se realiza generalmente mediante el umbral del valor de gris. A partir del análisis se pueden extraer conclusiones sobre diversas características. Una función muy conocida es, por ejemplo, el contador de píxeles.
El análisis de manchas se realiza mediante:
- Extracción de la zona de interés del fondo mediante la aplicación de un umbral a través del valor de gris
- Optimización de los criterios de búsqueda mediante diversos atributos
- Cálculo de las características buscadas, como el número de píxeles (contador de píxeles), el centro del área, la orientación, la forma (p. ej., redondez, rectangularidad) y el diámetro
¿En qué aplicaciones se utiliza el análisis de manchas?
Se utiliza en muchas aplicaciones diferentes. Por ejemplo, el análisis de manchas puede utilizarse para la comprobación de contenido completo, la comprobación de presencia o la detección de roscas, así como para el recuento y la clasificación de objetos.
Seguimiento de posición
El seguimiento de posición se lleva a cabo mediante un contorno de anclaje que se encuentra una sola vez en la imagen. Utilizando este contorno, las zonas de búsqueda de otros modelos (por ejemplo, la zona de búsqueda de un análisis de manchas) pueden ser rastreadas tanto en su posición como en su orientación.
Representación gráfica de un seguimiento de posición basado en el ejemplo:
Detección de bolas de soldadura en un clip

- En las puntas de un clip, se debe comprobar si están presentes las tres bolas de soldadura (indicadas en verde).
Dado que el contorno de una bola de soldadura varía, pero el área de una bola de soldadura permanece constante, se utiliza un análisis de manchas.Las zonas de búsqueda indicadas en naranja se definen para la comprobación de presencia en el área que se va a comprobar. - Para rastrear estas zonas de búsqueda en función de la posición y la orientación del clip, se define un contorno de referencia —el llamado contorno de anclaje— (indicado en rosa).El contorno del redondeo izquierdo del clip se "ancla" con las zonas de búsqueda del análisis de manchas.
- Si el clip gira ahora p. ej. 20 grados, el contorno de anclaje se encuentra también en estado girado. A continuación, las zonas de búsqueda naranja del análisis de manchas se rastrean automáticamente hasta encontrar la posición y orientación correctas.
La gama O2D5 de ifm utiliza un procesador de imagen CMOS de 1,2 MP (1280 x 960 píxeles).
- Cada píxel contiene un fotón que capta y amplifica la luz del objetivo de la cámara.
- Las microlentes en cada píxel maximizan el contacto de los fotones.
- El fotón acumula una carga eléctrica proporcional a la cantidad de luz que recibe.
- La carga eléctrica se convierte en una señal de tensión analógica.
- La señal analógica se transmite a un convertidor A/D.
- El procesador de imágenes evalúa cada señal digital y la convierte en una imagen.
Los procesadores de imagen CMOS son más fáciles, rápidos y baratos de fabricar, por lo que son los más utilizados en el mercado.

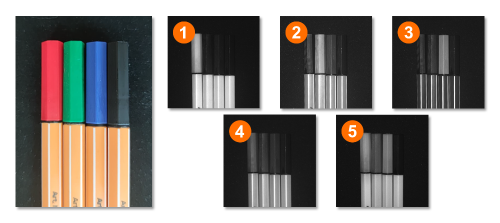
Es fundamental elegir la iluminación adecuada para maximizar el contraste de cada píxel. La gama O2D se completa con fuentes de luz LED integradas de alta intensidad en RGB-W (rojo, verde, azul, blanco) e infrarrojos.
Tenga en cuenta que el sensor de imagen no es un sensor de color.
Sin embargo, la elección de una fuente de luz con un color diferente puede afectar drásticamente al contraste de la imagen. La imagen siguiente muestra lápices de colores a la luz del día y los mismos lápices iluminados con los diferentes LED del sensor O2D5.
Comparación de las fuentes de luz
| Tipo de luz | A tener en cuenta: |
|---|---|
| Luz del día (referencia) |
|
| Luz roja |
|
| Luz verde |
|
| Luz azul |
|
| Luz blanca |
|
| Luz infrarroja |
|
Efecto del filtro de polarización
Debido a los reflejos, puede ser difícil obtener contornos o áreas nítidas en objetos brillantes. Los sensores O2D5 con fuentes de luz RGB-W contienen un filtro de polarización que se puede activar o desactivar para minimizar el efecto de los reflejos.
- Sin filtro de polarización
- Con filtro de polarización