- Encoder
- Tecnologia
Tecnologia dell'encoder
Tecnologia magnetica
Gli encoder basati sulla tecnologia magnetica utilizzano sensori a effetto Hall per rilevare i movimenti rotatori. I sensori rilevano l'orientamento di un magnete permanente fissato all'albero dell'encoder. Un microprocessore calcola quindi l'angolo di rotazione dell'albero in base ai segnali del sensore. Grazie al suo semplice principio meccanico, un encoder magnetico è più piccolo e molto più robusto di un encoder ottico.
Anche in termini di prestazioni di misura, la nuova generazione di encoder con tecnologia magnetica è ora all’altezza degli encoder ottici. Grazie ai moderni e potenti microprocessori, ad un software di elaborazione del segnale ottimizzato e ad una compensazione della temperatura implementata, la precisione di misura è stata aumentata fino ad un'accuratezza inferiore a 0,1 gradi. Le deviazioni dovute alle condizioni termiche sono ridotte al minimo. Il tempo di risposta dell'encoder, che in precedenza era compreso tra 700 e 1400 microsecondi, scende a quasi zero microsecondi, offrendo il comportamento di risposta di un encoder ottico.
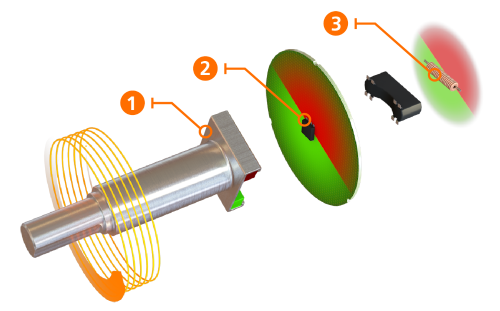
Nessun valore è perso: l'effetto Wiegand
Gli encoder magnetici rilevano rotazioni con angoli compresi tra 0° e 360°, ma il sensore a effetto Hall non è in grado di rilevare il numero di rotazioni complete senza un'alimentazione esterna. Questo problema è risolto dal sistema integrato di captazione di corrente, che si basa sull'effetto Wiegand e alimenta il circuito del contagiri con impulsi di tensione brevi e potenti. In questo modo, anche senza alimentazione esterna, l'encoder è in grado di rilevare e memorizzare in modo affidabile persino i giri a bassa velocità. Si esclude così un'assegnazione errata della posizione dovuta alla rotazione dell'albero al di fuori dei tempi di funzionamento della macchina, ad esempio a causa di una perdita di pressione in un meccanismo di sollevamento.
Tecnologia ottica
La luce emessa dalle fotocellule passa attraverso le fessure trasparenti incise su un disco di vetro rivestito. Gli impulsi vengono generati quando i raggi vengono interrotti.
- Gli encoder ottici sono molto precisi.
- Gli encoder ottici sono dispositivi complessi, composti da molti singoli componenti.
- La produzione dei dischi di vetro rivestiti è complessa e costosa. Rispetto agli encoder con tecnologia magnetica, si rompono facilmente se sono soggetti a urti e vibrazioni.
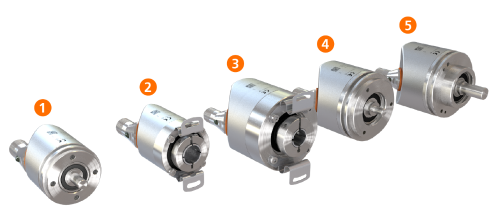
Panoramica sui tipi di flange e alberi
- Tipo RB / RMB come flangia Synchro con albero da 6 mm
- Tipo RA / RMA come flangia diretta con albero cavo
- Tipo RO / RMO come flangia diretta con albero cavo
- Tipo RU / RMU come flangia Synchro con albero pieno da 6 mm
- Tipo RV / RMV come clamping flange e albero pieno da 10 mm
Tipologie di albero
Albero pieno
Gli encoder con albero pieno vengono montati sugli alberi rotanti delle macchine con diametro uguale o simile, utilizzando un accoppiamento. Questi accoppiamenti compensano il disallineamento meccanico tra i due alberi e prevengono un'usura prematura. Questa combinazione è particolarmente indicata per le applicazioni soggette a urti o vibrazioni regolari.
Albero cavo
Gli encoder con albero cavo vengono montati direttamente sull'albero rotante. Non sono necessari accoppiamenti con l'albero, quindi il montaggio è più semplice. Al contrario, utilizzano una flangia di montaggio flessibile, chiamata giunto dello statore, che compensa lievi disallineamenti di installazione. Gli encoder con albero cavo aperto su un lato non hanno un foro di montaggio passante.
Diametro e dimensioni dell'albero
Il diametro corretto dell'albero è importante per garantire una precisione di montaggio ottimale dell'albero in entrata.
I diametri più comuni per gli alberi pieni sono 6 mm, 8 mm e 10 mm.
I diametri comuni per gli alberi cavi aperti su un lato sono compresi tra 6 e 15 mm. Per un'elevata flessibilità dei diametri, nell'albero cavo vengono inseriti manicotti riduttori da 6 a 14 mm.
Il diametro esterno viene solitamente inteso come dimensione di un encoder. Gli encoder ifm sono disponibili nelle dimensioni da 36 a 58 mm.