Obstacle sensing: Accuracy and efficiency for autonomous mobile robots

Improvements in obstacle sensing make autonomous mobile robots (AMR) more efficient and accurate. The result is higher throughput, fewer interruptions, and improved protection for equipment, and inventory. These improvements make AMRs more economically accessible for more businesses.
Obstacle sensing is the ability for a system to detect and identify objects that interfere with its desired path and adapt accordingly. Obstacle sensors are the devices that detect objects in the intended path and estimate their position, distance, and movement.
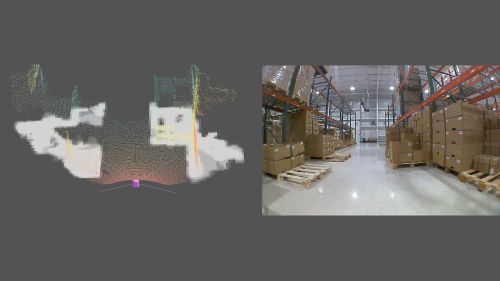
In mobile robot automation, obstacle sensors and algorithms detect walls, racks, equipment, people, and debris. They provide structured data so the controller can plan an efficient maneuver.
Today’s obstacle sensor systems combine high-resolution range measurements with 3D perception. This richer context enables robots to choose the best response: slow down, steer around, or stop. The result is smoother path planning, shorter delays, and better coexistence with people and vehicles in shared spaces.

False positives create inefficiencies by reducing availability and throughput. Robots stopping unnecessarily require manual resets or escorts. These actions erode operator trust and complicate fleet scheduling.
Common causes include:
- Floor-to-object ambiguity
- Specular reflections from shiny surfaces
- Environmental artifacts such as dust or vapor.
ifm prioritizes the prevention of false positives using:
- Robust floor segmentation
- Multimodal camera arrays
- Edge processing for fast, real-time decisionmaking
Our algorithm distinguishes genuine obstacles from reflections and floor features, stabilizing detections across lighting and surface conditions.
The outcome is fewer nuisance stops and higher mission completion rates. Fusing data from multiple obstacle sensors further reduces the risk of spurious alarms.
Modern obstacle sensing blends complementary modalities to maintain performance across diverse environments. Each obstacle sensor type brings distinct strengths that contribute to a resilient perception stack:
 Ultrasonic sensing |
 Laser-based sensing |
 Vision systems |
||
|---|---|---|---|---|
| Measures echo time from high-frequency sound pulses. It excels at detecting transparent or highly reflective surfaces where optical sensors may struggle, and is reliable at short to medium ranges. | Offerss precise range, wide fields of view, and rapid updates. Including time-of-flight lidar and safety laser scanners, these sensors support both mapping and protective fields for speed and separation monitoring. | Provide rich contextual information for classification and scene understanding. When combined with depth, they enable nuanced behaviors such as differentiating a person from a pallet or an overhanging load from a floor hazard. |
Active sensors like LiDAR and ultrasonic illuminate the environment for consistent ranging, while passive sensors such as cameras leverage ambient signals. Sensor fusion aligns these inputs into a coherent, redundant view. This setup raises confidence in detections and reduces the chances of misses and false alarms.
The result is obstacle sensing that remains dependable despite glare, dust, and changing floor textures.
Overall Equipment Effectiveness (OEE) is a key measure for manufacturing productivity, reflecting availability, performance, and quality. ifm’s obstacle sensing improves the OEE of autonomous mobile robots by reducing unnecessary stops, maintaining planned travel speeds when safe, and minimizing operator assists. This improvement begins with selecting durable obstacle sensors and configuring obstacle sensing to match the facility’s conditions.
| OEE Factor | How ifm obstacle sensing helps | Operational impact |
|---|---|---|
| Availability | Prevents nuisance stops with accurate floor segmentation and reflection handling | More uptime per robot shift and fewer manual interventions |
| Performance | Maintains speed through precise ranging and predictive tracking | Higher average velocity and better on-time mission completion |
| Quality | Consistent obstacle detection reduces near-miss events and path variance | More stable cycle times and improved handoff to downstream processes |
As availability and performance rise, fleets deliver more moves per day with the same number of robots—or the same workload with fewer robots. A well-engineered obstacle sensor suite also lowers maintenance costs by preventing wear from unnecessary stop-and-go cycling.
As obstacle sensing evolves, each new obstacle sensor generation will deliver higher resilience and greater context for safer human-robot collaboration. Emerging capabilities expand what obstacle sensing can do for autonomous fleets:
- Adaptive detection policies adjust stopping distance and protective fields based on current speed, payload, and surface conditions
- High-redundancy fusion maintains perception under adverse conditions such as dust, glare, and mixed lighting
- Fleet-aware perception shares obstacle data across robots to reduce congestion and inform route planning
- Algorithm updates classify and track real-world feedback without disrupting operations
ifm’s focus on false positive reduction, robust floor modeling, and low-latency processing supports tighter integration with controllers and standards-based architectures.
The outcome is more predictable behavior in mixed environments, providing a clearer path to scaling fleets without sacrificing safety or throughput.

Upcoming improvements and innovations
ifm is developing new obstacle sensing technology and features to further optimize AMRs:
- Cloud analytics will enable real-time data aggregation from multiple robots. This will support fleet-level optimization by balancing workloads and distributing tasks across the entire team of robots while also using real-world data to refine AMR operations.
- Semantic understanding is the ability for robots to detect not just the geometry of an object, but also its class and context. Understanding what an object is (e.g., a pallet, person, etc) will allow the robot to predict the object’s likely motion and select a path that minimizes delays.
When conditions change, such as a newly-polished floor creating more reflection, the system will adapt without degrading availability. Careful synchronization between each obstacle sensor and the planner will ensure the robot responds to the most current scene
understanding.
Built on proven sensing hardware and advanced perception algorithms, ifm’s obstacle sensing delivers robust performance in mixed-traffic aisles and across changing layouts through:
| Increased capability | Enhanced efficiency | Added value |
|---|---|---|
|
Our solution robustly detects small objects on the ground, including low-profile hazards such as fork tines, bolts, straps, and pallet fragments.
High-fidelity floor segmentation separates the floor plane from true obstacles, maintaining detection sensitivity without creating unnecessary stops.
The right obstacle detection sensor placement and calibration ensure consistent coverage of floor-level hazards and overhanging loads. |
Better object recognition and spatial awareness mean fewer unplanned stops requiring human intervention.
With precise tracking, robots maintain velocity when appropriate and take smooth, minimal-deviation detours when necessary.
This translates into more missions completed per day and greater fleet utilization. Operations experience higher availability and fewer manual escorts when obstacle sensing is reliable. |
Higher throughput makes each robot more valuable to the end user. With bill of materials costs for AMRs remaining relatively static, improving per-vehicle productivity reduces the number of units required to meet service levels.
Fewer robots for the same workload lowers capital expenditure and simplifies maintenance and support.
Robust obstacle sensors further reduce lifecycle costs by minimizing rework and downtime associated with nuisance stops. |