- 3D rozpoznávání předmětů
- Platforma pro robotiku O3R
Platforma vnímání O3R
Přehled platformy vnímání
Platforma vnímání O3R je brána s více senzory a kamerami ve velikosti a cenové struktuře spotřebitelských produktů, která se zároveň vyznačuje dlouhodobou dostupností a robustností průmyslových produktů. K centrální procesorové jednotce lze připojit až šest kamerových hlav prostřednictvím připojení FPD a další senzory, jako je radar nebo lidar, lze připojit prostřednictvím rozhraní Gigabit Ethernet. Díky flexibilní instalační poloze a uspořádání lze skenovat různě velké oblasti a zabránit například kolizi s překážkami, které vyčnívají do jízdní dráhy nad zorným polem bezpečnostního skeneru.
Výkonná centrální okrajová výpočetní jednotka nabízí dostatek prostoru pro spuštění vlastních algoritmů nebo pro použití hotových funkcí, jako je vyhýbání se kolizím nebo detekce palet.
Témy
Nejvyšší stupeň automatizace v automobilovém průmyslu
Odvětví autonomních vozidel (AV) usiluje o úroveň autonomie 5, tedy o plnou automatizaci, kdy není nutná žádná interakce s řidičem, která by umožnila běžnému spotřebiteli zakoupit AV.
- Výrobci si uvědomují, že úrovně 5 lze dosáhnout pouze pomocí systému vnímání, který umožňuje vozidlu lépe vnímat své okolí.
- Multimodální přístup k vnímání okolí vozidla.
- Každá modalita je navržena tak, aby překonala „slabiny“ jiné modality a vytvořila robustní platformu pro nejlepší povědomí o okolním prostředí ve své třídě.
Výzvy v mobilní robotice
Autonomie není pro mobilní robotiku novinkou (poprvé byla představena v 50. letech 20. století).
- Na rozdíl od odvětví autonomních vozidel jsou u mobilních robotů překážkou pro přijetí náklady.
- Vstupní body mobilních robotů vyžadují od uživatele velké investice, což prodlužuje dobu, než se dosáhne návratnosti investic.
- Výrobce je nucen dělat kompromisy při výběru hardwaru a zaměřit se především na bezpečnost, aby snížil náklady na výrobu.
- To v konečném důsledku omezuje celkovou flexibilitu robota, což snižuje jeho schopnosti.
Co kdybyste nemuseli dělat kompromisy?
Podívejme se na audiovizuální průmysl
Audiovizuální průmysl (AV) se ve svém záměru dosáhnout 5. úrovně autonomie nemýlí.Lepší povědomí o okolním prostředí vede k větší flexibilitě a lepšímu celkovému provozu AV.Stejnou schopnost by mělo mít i odvětví mobilních robotů.
Aby se toto stalo skutečností, je třeba zmírnit problémy v multimodálních aplikacích s více kamerami, včetně synchronizace a fúze senzorů.Jediným způsobem, jak snížit celkové náklady na vlastnictví platforem vnímání, je zjednodušit dizajn a integraci multimodálních systémů.
Platforma vnímání O3R byla navržena tak, aby tento úkol splnila.
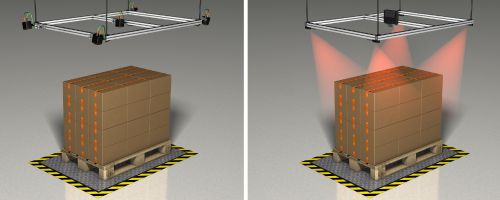
Platforma O3R je komplexním řešením pro centralizované a synchronizované zpracování obrazových a senzorových informací v autonomních mobilních robotech, jako jsou AGV. Zjednodušená integrace a spolehlivá interakce kamer a senzorů umožňuje spolehlivou implementaci příslušných funkcí, jako je předcházení kolizím, navigace a určování polohy. Kromě toho lze provádět analýzu a dimenzování stacionárních objektů, které se efektivněji provádí pomocí několika kamer. Příkladem může být měření palet, klád, balíků nebo kufrů.
Hlava kamery se snímačem vyvinutá společností ifm

Společnost ifm nabízí vhodné, vysoce výkonné kamerové hlavy jako součást řešení platformy: 2D/3D kamery mají volitelný úhel záběru 60° nebo 105° a jsou vybaveny nejnovějším zobrazovačem s analyzátorem času průchodu od společnosti pmdtechnologies ag. Tato společnost ze skupiny ifm vyvíjí všechny senzory pro optické výrobky pro automatizaci a přesně je přizpůsobuje příslušným požadavkům. Díky modulovanému infračervenému světlu detekuje 2D/3D kamera objekty s maximální spolehlivostí i při zvýšené expozici okolního světla.
Výkon a otevřenost: centrální jednotka pro smyslové zpracování

Jádrem systému je výkonná výpočetní jednotka nazvaná Video Processing Unit (VPU). Je založena na systému Yocto Linux a NVIDIA Jetson TX2 a podporuje otevřená vývojová prostředí, jako jsou ROS a Docker. K výpočetní jednotce lze připojit až šest kamerových hlav. Další senzory, například ultrazvukové senzory pro detekci skleněných povrchů, jako jsou dveře nebo příčky, lze připojit prostřednictvím rozhraní Gigabit Ethernet. Všechny relevantní „smysly“, které AGV potřebuje pro bezpečnou autonomní navigaci, jsou tak k dispozici v jednom centrálním bodě.
Softwarová architektura O3R usnadňuje předvývoj i sériový vývoj díky bohatému výběru softwarových nástrojů a podpoře mnoha rozhraní. Díky architektuře Docker jsou podporována otevřená vývojová prostředí, jako je Python, ROS, CUDA a C++.
| Linux je nejčastěji používaným operačním systémem v robotice.Pomocná zařízení musí být schopna komunikovat stejným jazykem. | |
| Kontejnery umožňují vývojáři plnou flexibilitu programovacího jazyka a prostředí. Při použití známého softwarového prostředí se zkracuje doba vývoje. | |
 |
ROS je běžný middleware používaný při vývoji.ROS2 umožňuje přechod od vývoje k použití. |
| Výkonné nástroje, jako jsou CUDA a Jetpack, lze plně nasadit na VPU založeném na NVIDIA. |