- Senzory náklonu
- Technologie
Technologie senzorů náklonu
„Elektronická vodováha“
Většina senzorů náklonu (nazývaných také inklinometry, senzory náklonu nebo sklonu), které jsou dnes na trhu k dispozici, je vybavena víceosým MEMS akcelerometrem (MEMS = mikroelektromechanický systém).
Tyto typy měřicích článků jsou velmi malé, přesné a robustní, nevykazují opotřebení a nevyžadují údržbu.
Zjednodušeně řečeno, měřicí článek MEMS se skládá ze dvou hlavních součástí: jedné pohyblivé elektronické části a jedné pevné mechanické části.
Pohyblivá vnitřní část, kterou tvoří zkušební hmota (seismická hmota), je na vnějším okraji opatřena elektrodami zavěšenými na pružných prvcích.
Těmito elektrodami je vybavena i pevná vnější část měřicího článku.
Elektrody umístěné v minimální vzdálenosti od sebe tvoří „hřeben“.
Jakmile se senzor nachází v horizontální poloze, je osa z senzoru obvykle rovnoběžná se zemským vektorem. Jeho hodnota je tedy „absolutní“ nula.
Pokud se senzor nakloní jedním směrem, pohyblivá hmota uvnitř a elektroda změní polohu vůči pevné elektrodě.

Detailní pohled na článek MEMS
- Pohyb (= zrychlení)
- Hřebenové elektrody ve vzájemné vzdálenosti ~1,3 µm
Výslednou změnu kapacity mezi těmito dvěma elektrodami detekuje měřicí článek a použije se k výpočtu konečné hodnoty úhlu.
DŮLEŽITÉ UPOZORNĚNÍ!
Každý senzor náklonu je z výroby dodáván s absolutní kalibrací.
Jako referenční vektor se používá gravitační vektor, tj. gravitační zrychlení 1G (= 9,81 m/s²).
Pokud je měřicí osa senzoru rovnoběžná nebo shodná se zemským vektorem, nemůže dojít k měření úhlu; senzor v této poloze není orientován. V důsledku toho není možné provést přímé měření úhlu (detekce otáčení) kolem svislé referenční osy (úhel vychýlení). Úhel vychýlení však lze vypočítat nepřímo prostřednictvím externí jednotky PLC.
Viz „Další funkce dynamického senzoru náklonu [JDxxxx]“.
Definice úhlů
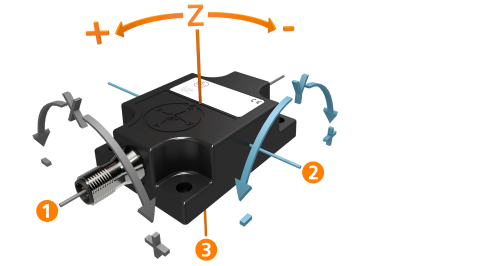
Definice úhlu s nulovou polohou osy z = gravitační vektor
- osa y „rolování“ (podélná) ⇒ úhel x
- osa x „výška“ (boční) ⇒ úhel y
- osa z „vychýlení“ (vertikální) ⇒ úhel z