- Recunoaștere obiect 3D
- Platforma robotică O3R
Platforma de percepție O3R
Platforma de percepție pe scurt
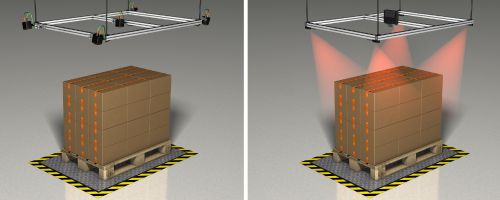
Platforma de percepție O3R este un gateway cu mai mulți senzori și camere, în dimensiunea și structura de costuri a produselor de consum - cu disponibilitatea și robustețea pe termen lung a produselor industriale. Prin intermediul conexiunii FPD, pot fi conectate până la șase capete de cameră la unitatea centrală de procesare, iar senzori suplimentari, cum ar fi radar sau lidar, pot fi conectați prin intermediul interfeței Gigabit Ethernet. Datorită poziției și dispunerii flexibile a instalației, pot fi scanate zone diferite și, de exemplu, pot fi prevenite coliziunile cu obstacole care ies în calea de deplasare deasupra câmpului vizual al scanerului de siguranță
. Unitatea de calcul centrală puternică oferă suficient spațiu pentru a rula algoritmi proprii sau pentru a utiliza funcții predefinite, cum ar fi evitarea coliziunilor sau detectarea paleților.
Subiecte
Cel mai înalt grad de automatizare din industria auto
Industria vehiculelor autonome (AV) urmărește nivelul 5 de autonomie, o automatizare completă în care nu este necesară nicio interacțiune cu șoferul, care ar permite unui consumator general să achiziționeze un AV.
- Producătorii recunosc că nivelul 5 poate fi atins numai cu un pachet de percepție care permite vehiculului să perceapă mai bine mediul înconjurător.
- Abordare multimodală pentru percepția din jurul vehiculului.
- Fiecare metodă este concepută pentru a depăși „punctele slabe” ale unei alte metode, creând o platformă robustă care asigură cea mai bună cunoaștere a mediului înconjurător din clasa sa.
Provocări în robotica mobilă
Autonomia nu este o noutate în domeniul roboticii mobile (introdusă pentru prima dată în anii 1950).
- Spre deosebire de industria AV, punctele de cost reprezintă o barieră în calea adoptării roboților mobili.
- Punctele de intrare pentru roboții mobili necesită o investiție mare din partea utilizatorului, ceea ce mărește timpul pentru a obține un ROI ridicat.
- Producătorii sunt forțați să facă compromisuri în ceea ce privește selecția hardware-ului, concentrându-se în primul rând pe siguranță, pentru a reduce costul BoM.
- În cele din urmă, acest lucru limitează flexibilitatea generală a robotului, ceea ce, la rândul său, îi reduce capacitatea.
Ce ați face dacă nu ar trebui să faceți compromisuri?
Să luăm exemplul din „cartea” AV
Industria AV nu se înșală în abordarea lor de a atinge nivelul 5 de autonomie.O mai bună conștientizare a mediului conduce la o flexibilitate mai mare și la o funcționare generală mai bună a unui AV.Aceeași capacitate ar trebui să existe și pentru industria roboților mobili.
Pentru ca acest lucru să devină realitate, trebuie atenuate provocările din aplicațiile multimodale și cu mai multe camere, inclusiv sincronizarea și fuziunea senzorilor.Singura modalitate de a reduce costul total al proprietății pentru platformele de percepție este simplificarea proiectării și integrării sistemelor multimodale.
Platforma de percepție O3R a fost concepută pentru a îndeplini această sarcină.
Platforma O3R este soluția completă pentru procesarea centralizată și sincronizată a informațiilor din imagini și senzori în roboți mobili autonomi, cum ar fi AGV-urile. Integrarea simplificată și interacțiunea fiabilă a camerelor și a senzorilor permite implementarea robustă a funcțiilor relevante, cum ar fi evitarea coliziunii, navigația și poziționarea. În plus, pot fi implementate analiza și dimensionarea obiectelor staționare, care sunt gestionate mai eficient prin intermediul mai multor camere. Printre exemple se numără măsurarea paleților, a buștenilor, a pachetelor sau a valizelor.
Cap de cameră cu convertor de imagine dezvoltat în cadrul companiei

ifm oferă capete de cameră adecvate, de înaltă performanță, ca parte a soluției de platformă: Camerele 2D/3D dispun opțional de un unghi de deschidere de 60° sau 105° și sunt echipate cu cel mai recent convertor de imagini cu timp de deplasare de la pmdtechnologies ag. Această companie din cadrul grupului de firme ifm dezvoltă toți senzorii pentru produsele de viziune ale specialistului în automatizări și îi adaptează cu precizie la cerințele respective. Datorită luminii infraroșii modulate, camera 2D/3D detectează obiectele cu o fiabilitate maximă chiar și în cazul unei expuneri crescute la lumina ambientală.
Puternic și deschis: unitatea centrală pentru procesarea senzorială

Elementul central al sistemului este o unitate de calcul puternică, denumită unitate de procesare video (VPU). Aceasta se bazează pe Yocto Linux și NVIDIA Jetson TX2 și suportă medii de dezvoltare deschise, precum ROS și Docker. Pot fi conectate până la șase capete de cameră la unitatea de calcul. Senzori suplimentari, cum ar fi senzorii cu ultrasunete pentru detectarea suprafețelor de sticlă, precum ușile sau pereții despărțitori, pot fi conectați prin intermediul unei interfețe Gigabit Ethernet. Astfel, toate „simțurile” relevante de care un AGV are nevoie pentru o navigare autonomă sigură sunt disponibile într-un punct central.
Arhitectura software O3R facilitează atât pre-dezvoltarea, cât și dezvoltarea în serie, printr-o selecție bogată de instrumente software și suport din numeroase interfețe. Prin utilizarea unei arhitecturi Docker, sunt acceptate medii de dezvoltare deschise, cum ar fi Python, ROS, CUDA și C ++.
| Linux este cel mai frecvent utilizat sistem de operare în robotică.Dispozitivele auxiliare trebuie să folosească același limbaj. | |
| Containerele permit dezvoltatorului o flexibilitate totală în ceea ce privește limbajul și mediul de programare. Timpul de dezvoltare este redus atunci când se utilizează un mediu software familiar. | |
 |
ROS este un middleware utilizat în mod obișnuit în dezvoltare.ROS2 oferă potențialul de a trece de la dezvoltare la implementare. |
| Instrumente puternice, precum CUDA și Jetpack, pot fi implementate în totalitate pe VPU-ul bazat pe NVIDIA. |