- Detección de objetos en 3D
- Plataforma robótica O3R
O3R: sistema de sensores multicámara para robótica móvil
La plataforma robótica de un vistazo
La plataforma robótica O3R es un sistema multicámara y multisensor que por su tamaño y estructura de costes es equiparable a los productos de consumo. Al mismo tiempo, ofrece todas las ventajas de un producto industrial consolidado, con disponibilidad a largo plazo, gran robustez y rendimiento fiable.
Se pueden conectar hasta seis cabezales de cámara al sistema central, la Unidad de Procesamiento de Vídeo (VPU), a través de FPD-Link. Mediante la interfaz Gigabit Ethernet pueden conectarse otros sensores, así como un radar o un lidar. Los cabezales de las cámaras se pueden instalar y distribuir de forma flexible. Esto permite escanear el entorno completo, evitando así colisiones con obstáculos que, por ejemplo, sobresalen por encima del campo de visión del escáner de seguridad en su trayectoria de desplazamiento.
La potente unidad central de computación periférica proporciona suficiente memoria y recursos informáticos para ejecutar algoritmos propios o utilizar funciones preconfiguradas, como la prevención de colisiones o la detección de palés.
Temas
El máximo nivel de automatización de la industria del automóvil
La industria del automóvil se esfuerza por alcanzar el nivel 5. Gracias a esta automatización completa, ya no es necesaria la interacción del conductor, de modo que un vehículo autónomo de este tipo no entraña riesgos ni siquiera para usuarios finales no experimentados.
Los fabricantes son conscientes de que el nivel 5 solo se puede alcanzar con un sistema de percepción que permita al vehículo captar su entorno en su totalidad.
- Fusión de múltiples señales de cámaras y sensores para proteger de forma fiable el entorno del vehículo. Cada principio de detección está diseñado para compensar los "puntos débiles" de otro principio, lo que en su conjunto hace que sea una solución robusta para la mejor percepción del entorno.
Tecnología probada, adaptada a un nuevo entorno
La autonomía se utiliza en la robótica móvil desde hace más de 70 años. El procedimiento, por tanto, no es nuevo, pero hasta ahora ha estado asociado a retos:
- A diferencia del sector de la automoción, el tema de los costes es un obstáculo para la incorporación de los robots móviles.
- Estos requieren una gran inversión inicial por parte del usuario, lo que pospone la consecución de un alto rendimiento de la inversión.
- Los fabricantes se ven obligados a hacer concesiones en la elección del hardware y centrarse principalmente en la seguridad para reducir los costes de fabricación. En última instancia, esto limita la flexibilidad general del robot, lo que a su vez reduce su rendimiento.
¿Qué le parecería no tener que hacer concesiones?
Automatizar la robótica móvil con la nueva plataforma O3R
El enfoque de la industria del automóvil para alcanzar el nivel 5 de automatización es correcto e importante. Porque una mejor percepción del entorno conlleva una mayor flexibilidad y un funcionamiento general más eficiente y seguro del vehículo autónomo.
Las mismas oportunidades y beneficios deberían existir para la industria de la robótica móvil.
Para conseguir también un alto nivel de automatización en la robótica móvil, es necesario superar los retos de las aplicaciones exigentes con múltiples cámaras, incluyendo la sincronización y la fusión de los sensores. La única forma de reducir el coste total de propiedad de las plataformas de percepción es simplificar la ejecución e integración de los complejos sistemas de sensores y cámaras.
La plataforma robótica O3R se desarrolló para cumplir este cometido.
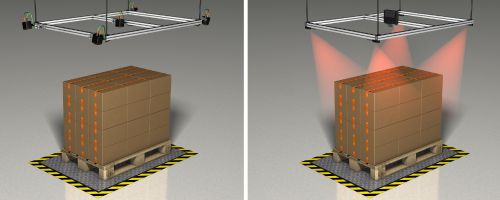
La plataforma robótica O3R es una solución integral para el procesamiento centralizado y sincronizado de la información de imágenes y sensores en robots móviles autónomos, como los AGV. La integración simplificada y la interacción fiable de cámaras y sensores permite la implementación firme de funciones relevantes como la prevención de colisiones, la navegación y el posicionamiento. Además, también se pueden implementar tareas de análisis y dimensionamiento para objetos estacionarios que pueden gestionarse de manera más eficaz con la ayuda de varias cámaras. Ejemplos de estas tareas son la medición de palés, troncos de árboles, paquetes o maletas.
Cabezal de cámara con generador de imágenes de desarrollo propio

ifm ofrece cabezales de cámara de alto rendimiento adaptados como parte de la solución de la plataforma: las cámaras 2D/3D ofrecen ángulos de apertura de 60° o 105° y están equipadas con el más avanzado generador de imágenes de tiempo de vuelo de pmdtechnologies ag. El grupo empresarial ifm desarrolla sensores que se utilizan en los productos de visión del especialista en automatización y los adapta de forma exacta a los respectivos requisitos. Gracias a la luz infrarroja modulada, la cámara 2D/3D detecta los objetos con la máxima fiabilidad incluso con una mayor luminosidad en el entorno.
Potente y abierta: la unidad central para el procesamiento sensorial

La pieza central del sistema es una potente unidad de computación, la Unidad de Procesamiento de Vídeo (VPU). La VPU está basada en Yocto Linux y NVIDIA Jetson TX2 y es compatible con entornos de desarrollo abiertos como ROS y Docker. La VPU tiene conexiones para hasta seis cabezales de cámara, y se pueden conectar sensores adicionales, como sensores ultrasónicos, para detectar superficies de cristal como puertas o mamparas, a través de una interfaz Gigabit Ethernet. Así, todos los "sentidos" relevantes que un AGV requiere para una navegación autónoma segura se registran y procesan en un punto central.
La arquitectura de software del O3R facilita tanto el desarrollo previo como el desarrollo en serie gracias a una amplia selección de herramientas de software y a la compatibilidad con múltiples interfaces. Al utilizar una arquitectura Docker, se admiten entornos de desarrollo de código abierto como Python, ROS CUDA y C++.
| Linux es el sistema operativo más utilizado en robótica. Los dispositivos auxiliares deben hablar el mismo idioma. | |
| Los contenedores Docker permiten al desarrollador una flexibilidad total en cuanto a lenguaje y entorno de programación. El tiempo de desarrollo se reduce al utilizar un entorno de software conocido. | |
 |
ROS es un soporte lógico intermedio de uso frecuente en el desarrollo. ROS2 ofrece todas las posibilidades de desarrollo y garantiza la máxima estabilidad en las aplicaciones reales. |
| Potentes herramientas como CUDA y Jetpack se pueden implementar completamente en la VPU basada en NVIDIA. |